












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于ANSYS Workbench的齿梳拨刀式油茶果采摘机拨果及花苞损伤仿真研究
[饶洪辉 , 罗时挺, 余佳佳, 张立勇, 刘木华
, 罗时挺, 余佳佳, 张立勇, 刘木华* ]
, 罗时挺, 余佳佳, 张立勇, 刘木华]
|
|


作者简介:饶洪辉(1978—),男,江西丰城人,博士,副教授,研究方向为现代农业机械装备。E-mail:rhh58@sohu.com
油茶果机械采摘中花苞损伤已成为行业亟待解决的问题。文章在ANSYS Workbench里建立了拨刀装置和油茶果及油茶花苞相互作用的三维模型,仿真分析了拨刀装置与油茶果及油茶花苞的相互作用情况,旨在揭示齿梳拨刀式油茶果机械采摘中花苞损伤机理,获得采摘中较优的拨刀参数。通过仿真分析,得到油茶果脱落的临界条件为拨刀初速度5 m·s-1、加速度2 m·s-2,而油茶花苞脱落的临界条件为拨刀初速度3 m·s-1、加速度2 m·s-2。其次分析在不同初速度和加速度状态下拨刀装置对油茶花苞的损伤情况,油茶花苞受拨刀击打后的最大等效应力和应变随加速度的增加呈略微减小的趋势,油茶花苞X方向的最大应变随加速度的增加呈略微增加的趋势,Y、Z两个方向的最大应变随加速度的增加呈略微减小的趋势。当拨刀厚度变为原来的1.5倍、2.0倍、2.5倍和3.0倍时,油茶果脱落的临界拨刀初速度分别为3.4、2.5、2.0和1.7 m·s-1;油茶果脱落的临界加速度分别为1.3、1.0、0.8和0.7 m·s-2。仿真结果表明,随着拨刀厚度增加,油茶果脱落的临界速度和加速度降低,实用性增强。
Camellia bud damage in the process of harvest by Camellia fruit picking machine is the most urgent problem. In order to reveal the theory of bud damage in mechanical picking of Camellia and to obtain the better picking parameters of dial knife, the effect between the tooth combing device and the Camellia and Camellia bud was analyzed. Firstly, the 3D model between tooth comb dial knife and Camellia fruit and bud were established in the ANSYS Workbench, the interaction between the dial knife device and Camellia and Camellia bud was simulated, simulation results showed that the critical initial velocity and the acceleration of the Camellia fruit peeling off were 5 m·s-1 and 2 m·s-2 respectively, and the critical initial velocity and the acceleration of Camellia bud dropping were 3 m·s-1 and 2 m·s-2, respectively. Secondly, the damage of Camellia bud was analyzed by the dial knife device at different initial velocity and acceleration, the maximum equivalent stress and strain of Camellia bud was slightly decreased with the increase of acceleration, the maximum strain in the X-direction of Camellia bud was slightly increased with the increase of acceleration, and the maximum strain in the two directions of Y and Z was slightly decreased with the increase of acceleration. As the dial knife thickness became 1.5 times, 2.0 times, 2.5 times and 3.0 times, the critical initial velocity of the dial knife to peeling off Camellia fruit were 3.4, 2.5, 2.0 and 1.7 m·s-1, respectively, and the critical acceleration of peeling off Camellia fruit were 1.3, 1.0, 0.8 and 0.7 m·s-2, respectively. The simulation results showed that with the increase thickness of the dial knife, the dial knife critical initial velocity and acceleration will be reduced, which can enhance the practicability of this machine.
一般林果采摘所需劳动力占整个过程的35%~45%左右[1], 且成本居高不下。油茶果采摘具有季节性强和劳动强度大的特点, 其劳动力占整个油茶种植用工的40%以上, 而劳动力采摘成本占收益的1/3左右, 高额的劳动力采摘成本降低了林农的收入。特别是随着农村劳动力向城镇转移, 油茶果采摘季节劳动力日益短缺, 势必进一步增加劳动力成本, 影响油茶产业的健康发展。因此, 油茶果的机械化采摘迫在眉睫。
湖南、江西作为我国油茶种植面积最大的两省, 其高校和科研机构对采摘期油茶果生物力学特性和油茶果采摘机械研究较早[2, 3, 4, 5, 6, 7]。中南林业大学高自成等人设计了一种齿梳回转式油茶果采摘机[8], 先由人操作多自由度机械臂进入油茶树合适的采摘位置, 通过采摘头的回转运动实现采果, 试验表明当齿梳式采摘头上升速度约为0.8 m· s-1, 采摘头回转速度为15 r· min-1左右时, 既可获得较高的采摘效率, 又能将漏摘率问题控制在3.2%以内, 同时保证油茶花苞的损伤率控制在3%以内。程学良等[9]建立了两自由度的曲柄连杆式采摘机, 分析了不同夹持高度对采摘机和油茶果树振动的影响。王朋辉等[10]设计了一种适用于林果采收的摆动式林果采摘头, 并对该采摘头进行动力学分析和动力选型。张立勇等[11]设计了一种适合园艺化栽培的履带式油茶果采摘机, 并在ADMAS软件中对机械臂参数化并进行试验设计和优化仿真。罗时挺等[12]设计了一款齿梳拨刀式油茶果采摘装置, 并对齿梳拨刀拨果原理进行分析, 得出了影响拨刀采摘效果的主要因素, 并对拨刀前端点的速度和加速度进行了仿真分析。以上油茶果采摘机械实现了对油茶果的采摘, 然而对采摘过程中花苞损伤机理还未进行深入研究。由于油茶花苞是油茶树翌年的果, 油茶果机械采摘中花苞损伤会对翌年的产量造成巨大的影响, 在油茶果机械采摘过程中要尽可能减少对花苞的损伤。
为了探讨油茶果机械采摘中花苞损伤规律, 本文拟在ANSYS Workbench建立拨刀装置和油茶果及油茶花苞相互作用的三维模型, 仿真分析齿梳拨刀装置对油茶果和油茶花苞的作用效果, 从而揭示齿梳拨刀式油茶果机械采摘中花苞损伤机理和获得采摘中较优的拨刀参数。
根据油茶果采摘机的结构参数和运动过程, 在Workbench中建立拨果的三维结构模型, 齿梳、拨刀及齿梳之间的间距根据实际样机设计定义尺寸, 为简化模型难度, 定义果(花)柄枝、油茶果及油茶花苞尺寸近似为圆柱形、球形和椭圆形, 通过取样, 游标卡尺测量获取, 具体参数见表1所示。
| 表1 样品参数 Table 1 Parameters of sample |
由于油茶果、花苞与树枝之间的连接是生物力学连接, 所以需特殊定义, 仿真当中利用接触面的形式定义两者之间的连接, ANSYS Workbench当中提供6种接触类型[13], 分别为:bonded, no separation, frictionless, rough, frictional和forced frictional sliding。其中frictional为有摩擦的接触, 两个接触面之间既可以法向分离, 也可以切向滑动, 当切向外力大于最大静摩擦力时, 发生切向滑动, 一旦发生切向滑动后, 会在接触面之间出现滑动摩擦力。因此frictional接触方式较为符合花苞、油茶果与花(果)柄枝的连接方式。根据采摘期油茶果、花苞与树枝之间结合力和常用材料间摩擦系数值, 定义花苞、油茶果与花(果)柄枝间的摩擦系数分别为0.2和0.3。具体建模如图1所示。
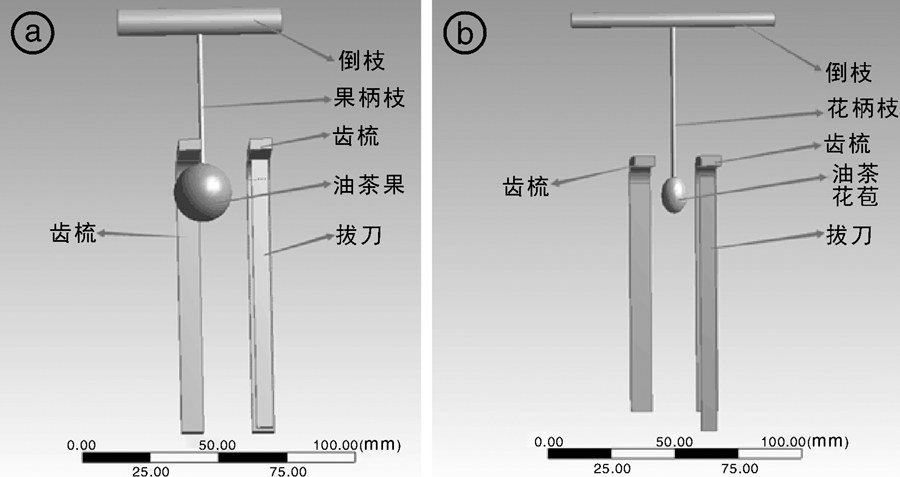 | 图1 油茶果、油茶花苞及拨刀装置相互作用模型a, 油茶果; b, 油茶花苞Fig.1 Interaction model between dial knife device and Camellia fruit and buda, Camellia fruit; b, Camellia bud |
由于油茶果、油茶花苞和果(花)柄枝不是常规材料, 无法直接从ANSYS Workbench的材料库中获取, 需进行实验; 采摘若干油茶果、油茶花苞和果(花)柄枝, 用精密平衡仪测质量, 排水法测体积, 两者相除得到密度, 取平均值。油茶果、油茶花苞和油茶果(花)柄枝的弹性模量采用TMS-PRO食品物性分析仪分别测量3次, 测试速度5 mm· min-1, 得到位移-载荷曲线, 由测试样品的面积和相关公式计算其弹性模量, 取3次测量的平均值, 具体如表2所示。
| 表2 模型材料密度和弹性模量 Table 2 Density and elastic modulus of model material |
网格划分是有限元分析的重要步骤, 网格质量将会影响采摘机的仿真结果。ANSYS Workbench网格共有六种划分方法[14]:四面体划分、扫掠划分、自动划分、多区划分、混合划分和CFX-网格划分。综合考虑计算精度和耗时, 不同元件进行不同单元尺寸划分, 其中花苞和油茶果的单元尺寸为0.001 mm, 拨刀单元尺寸为0.001 mm, 齿梳单元尺寸为0.005 mm, 果(花)柄枝单元尺寸为0.002 mm, 如图5所示。根据采摘头的运动分析, 定义拨刀为刚性结构, 花苞为柔性结构, 在拨刀施加初速度和加速度, 约束施加在树枝两个端面上。
在前期模型的基础上, 设定求解条件, 在ANSYS Workbench计算求解。以拨刀初速度和加速度(加载力)两个评价指标作为参考, 以油茶果和油茶花苞受拨刀不同初速度和加速度作用下的脱落状态来衡量仿真效果, 得到拨刀装置击打油茶果和花苞的总变形、等效应力和等效应变。
 | 图2 油茶果、油茶花苞及拔刀装置相互作用网格模型a, 油茶果; b, 油茶花苞Fig.2 Grid division interaction model between dial knife device and Camellia fruit and buda, Camellia fruit; b, Camellia bud |
图3和图4为油茶果临界脱落的两种状态, 其对应拨刀速度和加速度分别为5 m· s-1、2 m· s-2和6 m· s-1、3 m· s-2。图5油茶花苞临界脱落状态, 其对应的拨刀初速度和加速度分别为3 m· s-1、2 m· s-2。由于油茶花苞的损伤在油茶果被采摘脱落的前提下分析才有实际意义, 为获得油茶花苞在拨刀作用下的碰撞损伤情况, 分析了在拨刀初速度和加速度分别为6 m· s-1、3 m· s-2时对油茶花苞的碰撞损伤情况, 见图6。
 | 图3 拨刀速度和加速度分别为5 m· s-1和2 m· s-2时油茶果脱落临界点效果图a, 总变形; b, 等效应力; c, 等效应变。油茶果最大变形为2.852 mm; 油茶果最大应力为0.172 96 MPa; 油茶果最大应变为0.016 946Fig.3 Critical falling off point of Camellia fruit under velocity and acceleration of dial knife of 5 m· s-1 and 2 m· s-2a, Total deflection; b, Equivalent effective stress; c, Equivalent effective strain. The maximum deformation of Camellia fruit was 2.852 mm; The maximum stress of Camellia fruit was 0.172 96 MPa; The maximum strain of Camellia fruit was 0.016 946 |
 | 图4 拨刀速度和加速度分别为6 m· s-1和3 m· s-2时油茶果脱落临界点效果图a, 总变形; b, 等效应力; c, 等效应变。油茶果最大变形为5.125 2 mm; 油茶果应力最大值为0.177 97 MPa; 油茶果最大应变为0.057 208Fig.4 Critical falling off point of Camellia fruit under velocity and acceleration of dial knife of 6 m· s-1 and 3 m· s-2a, Total deflection; b, Equivalent effective stress; c, Equivalent effective strain.The maximum deformation of Camellia fruit was 5.125 2 mm; The maximum stress of Camellia fruit was 0.177 97 MPa; The maximum strain of Camellia fruit was 0.057 208 |
 | 图5 拨刀速度和加速度分别为3 m· s-1和2 m· s-2时油茶花苞脱落临界点效果图a, 总变形; b, 等效应力; c, 等效应变。油茶花苞最大变形为1.324 9 mm; 油茶花苞最大应力为0.850 09 MPa; 油茶花苞最大应变为0.020 679Fig.5 Critical falling off point of Camellia bud under velocity and acceleration of dial knife of 3 m· s-1 and 2 m· s-2a, Total deflection; b, Equivalent effective stress; c, Equivalent effective strain. The maximum deformation of Camellia bud was 1.324 9 mm; The maximum stress of Camellia bud was 0.850 09 MPa; The maximum strain of Camellia bud was 0.020 679 |
 | 图6 拨刀速度和加速度分别为6 m· s-1和3 m· s-2时油茶花苞脱落临界点效果图a.总变形; b. 等效应力; c. 等效应变。油茶花苞最大应变为0.179 09; 油茶花苞最大变形为13.046 mm; 油茶花苞最大应力为0.240 23 MPaFig.6 Critical falling off point of Camellia bud under velocity and acceleration of dial knife of 6 m· s-1 and 3 m· s-2a.Total deflection; b. Equivalent effective stress; c. Equivalent effective strain. The maximum deformation of Camellia bud was 13.046 mm; The maximum stress of Camellia bud was 0.240 23 MPa; The maximum strain of Camellia bud was 0.179 09 |
为了寻找介于油茶果、油茶花苞在拨刀作用下临界脱落参数前后的变化规律, 分别对临近油茶果、油茶花苞临界脱落参数时的情况进行仿真分析。选择拨刀初速度和加速度为4.5 m· s-1、2 m· s-2分析临近油茶果临界脱落时的作用效果, 得到其等效应力和应变, 见图7。选择拨刀初速度和加速度为2.5 m· s-1、2 m· s-2分析临近油茶花苞临界脱落时的作用效果, 得到其等效应力和应变, 见图8。
 | 图7 拨刀初速度和加速度分别为4.5 m· s-1和2 m· s-2时油茶果的等效应力和等效应变图a, 等效应力; b, 等效应变。应力最大值为0.107 83 MPa; 最大应变0.008 91Fig.7 Equivalent strain and stress of Camellia fruit under velocity and acceleration of dial knife of 4.5 m· s-1 and 2m· s-2a, Equivalent effective stress; b, Equivalent effective strain. The maximum stress was 0.107 83 MPa; The maximum strain was 0.008 91 |
 | 图8 拨刀初速度和加速度分别为2.5 m· s-1和2 m· s-2时油茶花苞的等效应力和等效应变图a, 等效应力; b, 等效应变。 最大应力值0.509 3 Mpa; 最大应力变形0.007 819 5Fig.8 Equivalent strain and stress of Camellia bud under velocity and acceleration of dial knife of 2.5 m· s-1 and 2m· s-2a, Equivalent effective stress; b, Equivalent effective strain. The maximum stress was 0.509 3 MPa; The maximum strain was 0.007 819 5 |
为揭示齿梳拨刀式油茶果机械采摘花苞损伤机理, 选择拨刀初速度为3 m· s-1, 加速度为0.5、1.0、1.5、2.0 m· s-2 4种不同状态下击打油茶花苞, 得到其仿真后的应力和应变规律, 并分别求解油茶花苞在X、Y、Z三个方向的应变情况, 得到对应的应变效果图及规律, 结果见图9、10。
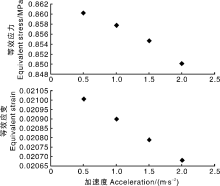
 | 图9 油茶花苞在不同拨刀加速度下的最大等效应力和最大等效应变图Fig.9 Maximum equivalent stress and maximum equivalent strain of Camellia bud under the condition of different acceleration of dial knife |
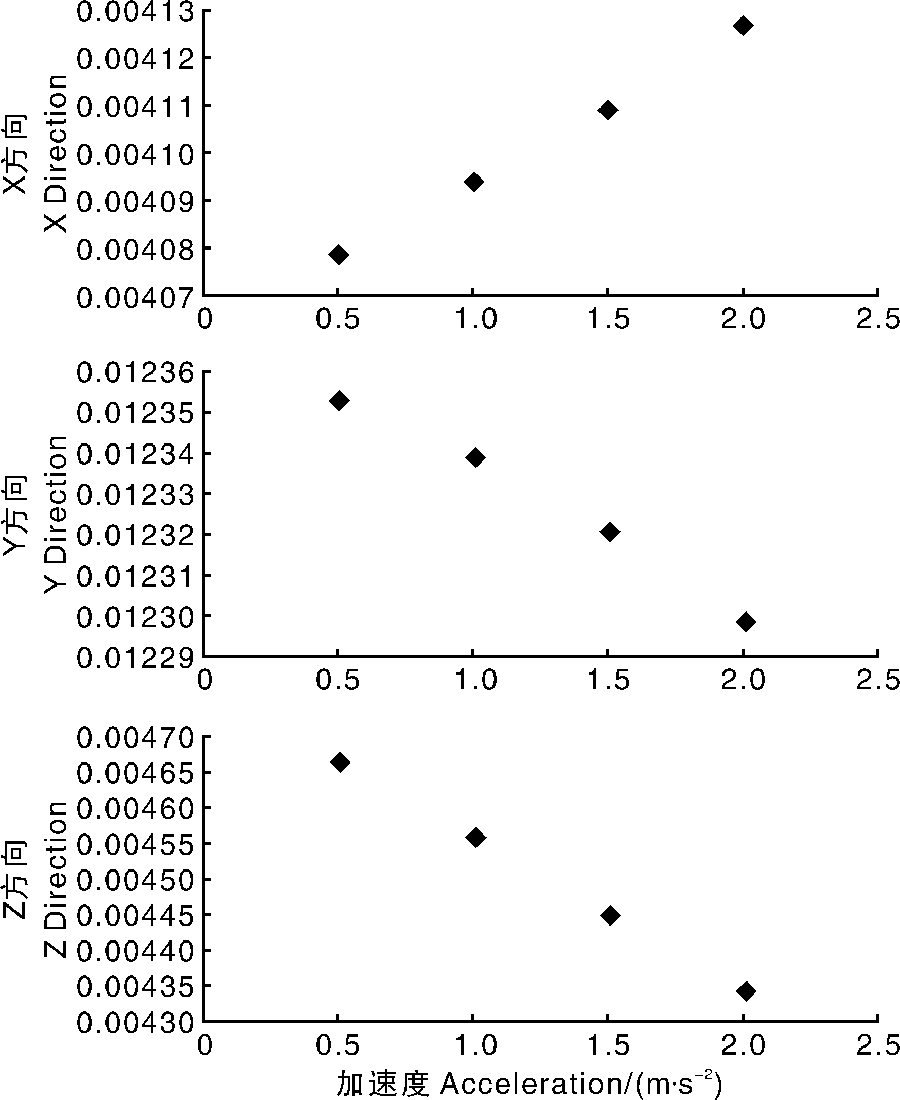 | 图10 油茶花苞在不同拨刀加速度下的X、Y、Z方向最大等效应变图Fig.10 Maximum equivalent strain of Camellia bud under the condition of different acceleration of dial knife in X, Y, Z direction |
从图3至图10可以得出:
1)花苞和油茶果的变形量主要集中于下半部分, 且从下半部分到上半部分形变量逐渐减小, 其原因是由于油茶果和花苞上部受树枝约束, 而下部都处于无约束状态, 所以变形主要产生区域以下半部分为主。
2)花苞和油茶果应变主要集中于与拨刀接触的中心区域, 主要是拨刀冲击力对该区域造成相对变形最大。
3)花苞和油茶果的最大应力变形区也主要集中于与拨刀接触的中心区域, 产生原因在于中心区域与拨刀最先接触, 所承受的冲击最大, 导致该区域应力集中。
4)随着拨刀初速度和加速度的增加, 油茶果受拨刀击打后的最大等效应力增加, 等效应变增加, 总变形也增加; 在拨刀相同加速度, 不同初速度状态下, 油茶果受拨刀击打后的最大等效应力和等效应变增加。
5)随着拨刀初速度和加速度的增加, 油茶花苞受拨刀击打后的最大等效应力增加, 等效应变增加, 总变形也增加; 在拨刀相同加速度, 不同初速度状态下, 油茶花苞受拨刀击打后的最大等效应力和应变增加。
6)在相同拨刀初速度3 m· s-1, 不同拨刀加速度状态下, 油茶花苞受拨刀击打后的最大等效应力和应变随加速度的增加呈略微减小的趋势, 油茶花苞X方向的最大应变随加速度的增加呈略微增加的趋势, Y、Z两个方向的最大应变随加速度的增加呈略微减小的趋势。
采摘机研制后在江西农业大学树木标本园内油茶果树进行了试验, 结果表明, 在采摘过程中, 对花苞造成损伤较少, 初步验证齿梳拨刀式油茶果采摘机的有效性。但同时装置存在一定问题, 如齿梳拨刀式油茶果采摘装置在采果时, 由于拨刀拨果位置不一定在油茶果中部, 而且拨刀较薄, 油茶果韧性好有时会滑过拨刀导致拨果失败。另外拨落果实所需要的拨刀初速度和加速度较大, 与前面仿真结果一致, 但由于操纵拨刀的牵拉丝有效行程短, 人手操作要达到较高的拨刀初速度和加速度有困难。因而需要对拨刀装置进一步优化。
针对试验中存在的问题, 对拨刀厚度进行优化, 以降低油茶果脱落时拨刀所需的初速度和加速度。将拨刀厚度变为原来1.5、2.0、2.5和3.0倍, 建立相应模型, 再次进行仿真分析, 图11、12、13和14分别为拨刀装置加厚后对油茶果和油茶花苞作用效果。其中油茶花苞受优化厚度后的拨刀作用下的应力应变规律曲线见图15所示。
 | 图11 初速度3.4 m· s-1、加速度1.3 m· s-2时1.5倍拨刀厚度下对油茶果和油茶花苞作用效果a, 油茶果Camellia fruit; b, 油茶花苞Camellia budFig.11 Effects between 1.5 times thickness of dial knife and Camellia fruit and bud under velocity and acceleration of dial knife of 3.4 m· s-1 and 1.3 m· s-2 |
 | 图12 初速度2.5 m· s-1、加速度1 m· s-2时2.0倍拨刀厚度下对油茶果和油茶花苞作用效果a, 油茶果Camellia fruit; b, 油茶花苞Camellia budFig.12 Effects between 2.0 times thickness of dial knife and Camellia fruit and bud under velocity and acceleration of dial knife of 2.5 m· s-1 and 1 m· s-2 |
 | 图13 初速度2 m· s-1、加速度0.8 m· s-2时2.5倍拨刀厚度下对油茶果和油茶花苞作用效果a, 油茶果Camellia fruit; b, 油茶花苞Camellia budFig.13 Effects between 2.5 times thickness of dial knife and Camellia fruit and bud under velocity and acceleration of dial knife of 2 m· s-1 and 0.8 m· s-2 |
 | 图14 初速度1.7 m· s-1、加速度0.7 m· s-2时3.0倍拨刀厚度下对油茶果和油茶花苞作用效果a, 油茶果Camellia fruit; b, 油茶花苞Camellia budFig.14 Effects between 3.0 times thickness of dial knife and Camellia fruit and bud under velocity and acceleration of dial knife of 1.7 m· s-1 and 0.7 m· s-2 |
 | 图15 油茶花苞在不同拨刀厚度下的最大等效应力和最大等效应变图Fig.15 Maximum equivalent stress and maximum equivalent strain of Camellia bud under the condition of different thickness of dial knife |
由图11至图15可以看出, 油茶花苞所受的应力和应变随着拨刀厚度的增加而逐渐减小; 油茶果脱落的拨刀临界初速度和加速度大大降低。考虑到油茶花苞的损伤只有在油茶果脱落的情况下才有实际意义, 将优化拨刀厚度后的油茶果脱落临界条件应用于油茶花苞, 油茶花苞在同样厚度拨刀初速度和加速度也将脱落。
1)在ANSYS Workbench建立了拨刀装置与油茶果、油茶花苞相互作用的三维模型。
2)分析了不同拨刀初速度和加速度的仿真, 得到了油茶果和油茶花苞脱落的临界条件, 可为油茶果机械采摘和采摘中花苞损伤提供理论参考。
3)分析了拨刀在相同初速度, 不同加速度情况下油茶花苞受拨刀装置作用的应力应变规律, 揭示了齿梳拨刀式油茶果采摘机采果时花苞损伤机理。
4)通过优化拨刀厚度方案, 可较大程度地减小油茶果脱落时拨刀初速度和加速度, 进一步增强采摘机的实用性。
(责任编辑 张 韵)
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|