



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于云模型推理的施肥机pH值和电导率解耦控制
[李颀 , 武付闯
, 武付闯* ]
, 武付闯]
|
|


作者简介:李颀(1973—),女,陕西西安人,硕士,教授,研究方向为工业自动化与智能控制。E-mail:liqidq@sust.edu.cn
施肥机肥水pH值和电导率(EC)调节过程中,由于水分蒸发、植物对水分和营养物质的吸收等,调节过程存在非线性、时滞性、时变性、不确定性等特点,较难建立精确的数学模型。为实现施肥机pH值和EC值的稳定调节,提出一种基于云模型推理的施肥机pH值和EC值解耦控制方法。采用正态云模型描述调节误差语言值,基于一维正态云模型规则推理设计出云模型控制器,对pH值和EC值进行解耦控制并在线修正。利用阳台蔬菜机进行施肥控制试验,结果表明,提出的云模型控制器能够满足施肥机pH值和EC值精确配比以及施肥的要求,有效提高肥水利用率。
Due to evaporation, plants absorption of water and nutrients, and other factors, the adjustment process of pH and electric conductivity (EC) value of fertilizer and water of fertilizer applicator existed problems such as nonlinear, time-lag, time-varying and uncertainty. Therefore, it was difficult to establish accurate mathematical model. In order to realize the stable adjustment of pH and EC value, an EC and pH decoupling control method for fertilizer applicator was proposed based on cloud model reasoning. In this method, normal cloud model was adopted to describe adjust error language value, and a cloud model controller was designed based on one-dimensional normal cloud model rule reasoning to realize the decoupling control of pH and EC value and online correction. Experimental test showed that the proposed cloud model controller could meet the requirement of precision of pH and EC value, and improve the utilization rate of fertilizer and water.
无土栽培技术是一种不采用天然土壤, 而采用人工配制含有植物生长发育所必需元素的营养液来供给营养, 使植物正常完成整个生命周期的种植技术[1]。相较于传统的土培, 蔬菜无土栽培具有产量高、品质好、节约水分和养分、清洁卫生、省力省工、易于管理、避免土壤连作障碍、不受地区限制、可充分利用空间等优点。近几年来, 我国蔬菜无土栽培面积发展呈直线上升趋势[2]。
在无土栽培技术中, 肥水混合过程是一个具有时变、时滞特性的复杂系统, 并且培养液中的pH值和电导率(electric conductivity, EC)之间具有相互耦合作用[3]。能否为植物生长提供比例协调、浓度适宜的营养液, 是栽培成功的关键[4]。现有的对无土栽培中肥水pH值和EC值控制的研究主要集中在基于模型的控制策略和人工智能控制策略方面。常规采用的基于PID算法的肥水调节控制只是单一地控制pH值和EC值, 对两者间存在的耦合关系缺乏考虑, 而且该方法的调节效果依赖于模型的精度, 但获取一个精确的模型往往需要花费较大的成本。
本研究旨在设计一个适合植物生长需求的肥水信息在线式检测和实时调节控制系统。由于施肥机营养液pH值和EC值调节过程控制本质具有非线性、时滞性、时变性、不确定性等特点, 很难按照传统的思路依赖建立精确的数学模型进行控制[5], 因此, 本研究拟在不确定性知识的基础上, 依据一些合理的标准, 将定性概念与定量描述进行合理转换, 推出一个具有一定可行性的结论应用于施肥过程, 从而使土培系统肥水的pH值和EC值符合控制要求, 更好满足植物生长需求。
以某公司生产的阳台蔬菜机为研究对象。该蔬菜机以微控器为核心, 依靠传感器采集光照、EC值、pH值等。由于水培植物对肥水的pH值和EC值控制精度要求较高, 而植物生长的不同阶段对于营养成分的吸收不同, 温度、湿度等也会对植物吸收营养成分有一定影响, 加之植物生长过程对水分的吸收和外界光照情况下水分本身的蒸发等, 系统总的肥水体积始终处于一个变化范围内, 而且肥水EC值和pH值之间的耦合关系也会对营养液的配比产生影响, 导致系统在实际运行过程中, 肥水pH值和EC值的调节值与设定值之间偏差较大; 因此, 系统拟采取基于云模型推理的解耦控制器调节营养液和酸液的释放量, 适时调节肥水的pH值和EC值, 以更好满足植物不同生长阶段的营养需求。
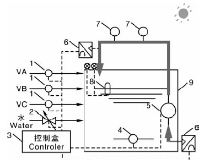
本研究所用施肥机的实物如图1所示, 结构图如图2所示。整个系统以混合罐为反应中心, 共有4个输入和1个输出。输入分别为营养液VA液、VB液、VC液和灌溉水, 输出为反应混合后的肥水, 由灌溉施肥泵加压送至植株根部。营养液VA液、VB液和VC液经由蠕动泵注入混合罐, 由蠕动泵的开启时间可得知各种营养液实际的注入量。检测通道由2组pH值、EC值传感器并联组成, 用于检测混合好的营养液的pH值、EC值。
 | 图1 阳台蔬菜机实物图Fig.1 Physical map of balcony vegetables fertilizer applicator |
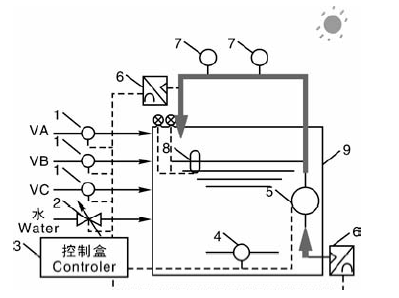 | 图2 施肥EC值、pH值调节过程示意图1, 蠕动泵; 2, 补水开关; 3, 控制盒; 4, 搅拌泵; 5, 施肥泵; 6, EC值、pH值传感器; 7, 水培植物; 8, 带液位指示的浮球开关; 9, 混合罐Fig.2 Schematic diagram of EC value and pH adjustment1, Peristalsis pump; 2, Water switch; 3, Control box; 4, Mixing pump; 5, Fertilizer pump; 6, EC value, pH value sensor; 7, Water culture plants; 8, Floating ball switch with level indicator; 9, Mixing tank |
为了提高传感器测量的精度, 降低过程干扰对参数测量结果的影响, 将一组pH值、EC值传感器用于测量, 另一组pH值、EC值传感器用于校正。具体过程如下:在采样时刻分别采集进水和出水2个通道的传感器测量值, 对2个测量值求差, 若差值在正常范围内则判定该次有效, 并以2个测量值的平均值作为本次采集值, 否则产生报警信号。
基于云模型推理的施肥机pH和EC值解耦控制系统的硬件整体示意图如图3所示。STC芯片外围电路简单, 片上资源已经可以满足施肥机需求, 其低成本、低功耗的特点适合于本研究设计的自动施肥灌溉测控系统。采取STC15F2K60S2作为主控器, 与外围电路相连接, 采用HMI串口屏实现人机交互操作界面。用户只需接上电源, 按照界面提示选择种植的蔬菜一键种植即可。如果用户自己有种植经验, 也可以按照自己的意愿手动操作开启或关闭各类泵, 实现肥液pH值和EC值的手动调节。串口屏上可实时显示当前温度、光照度、pH值和EC值以及种植天数等信息, 供用户查看。
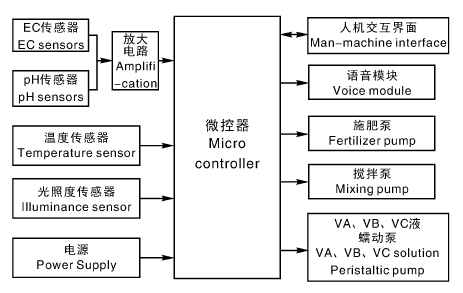 | 图3 施肥机硬件电路设计Fig.3 Hardware circuit design of fertilizer applicator |
阳台蔬菜机。本文以某公司生产的阳台蔬菜机作为控制对象。蔬菜机上包含有肥水混合罐, 水体总容量约10 L, 用以混合营养液, 供给水培植物根部吸收。
蠕动泵, 选取kamoer微型水泵3 V直流电机, 流速为5.2 mL· min-1, 用以将酸液和营养液缓慢加入混合灌中, 给植物提供适宜的生长环境和营养供给。
搅拌泵, 选取直流12 V供电, 0.5 m扬程功率为2 W的小型普通水泵, 主要功用是当营养液加入后开启搅拌泵, 使肥水充分搅拌混合, 防止结晶。
施肥泵, 选取直流12 V供电, 2 m扬程20 W大功率普通水泵, 肥水混合均匀后由施肥泵将肥水送至植物根部供给吸收, 实现肥水循环。
EC值传感器, 选用陆恒生物生产的工业在线电导率仪探头EC计电导率仪电极耐高温不锈钢传感器, 通过检测肥水中EC值来观测营养物质含量是否达到植物生长需求, 实现营养液的合理供给。
pH值传感器, 选用陆恒生物生产的标准BNC接口DJS-1C电极pH传感器, 检测肥水中的pH值是否适宜植物生长, 为水培植物成长构建适宜的环境。
水培植物, 通过对植物生长状况的记录, 与不采用该云模型的控制器培育的植物生长状况进行比照。
控制盒, 搭载云模型控制器解耦算法设计, 分析处理采集到的传感器数据, 控制植物生长肥水的pH值及EC值, 使植物生长在适宜的营养供给环境下。
云模型控制器主要由量化因子模块、云模型映射模块和驱动因子模块3部分组成。本系统中, 施肥机通过EC和pH传感器获得EC值和pH值, 将其与期望设定值的误差通过量化因子归一化处理后作为上述云模型映射器的定量输入, 将云模型推理规则映射输出的定量值通过驱动因子转化为蠕动泵的开启时间, 从而实现施肥机的肥水控制。
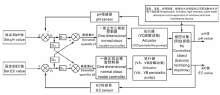
植物不同阶段对于营养物质需求不同, 加之温度、湿度、光照强度还有植物对水分吸收和蒸发散失水分等因素都对施肥过程有较大影响; 因此, 本研究应用正态云模型推理方法综合各类因素进行相关推理, 使营养成分维持在正常范围内。由于EC值与pH值之间存在耦合关系, 随着EC值的不断变化, pH值亦会随之发生波动, 这时仅仅依靠云模型推理是无法解决二者耦合关系的, 因此, 系统设计还需要考虑EC值与pH值间的耦合关系并进行解耦处理, 从而使EC值和pH值控制在规定值范围内。图4为pH值和EC值的云模型控制器解耦控制方框图。
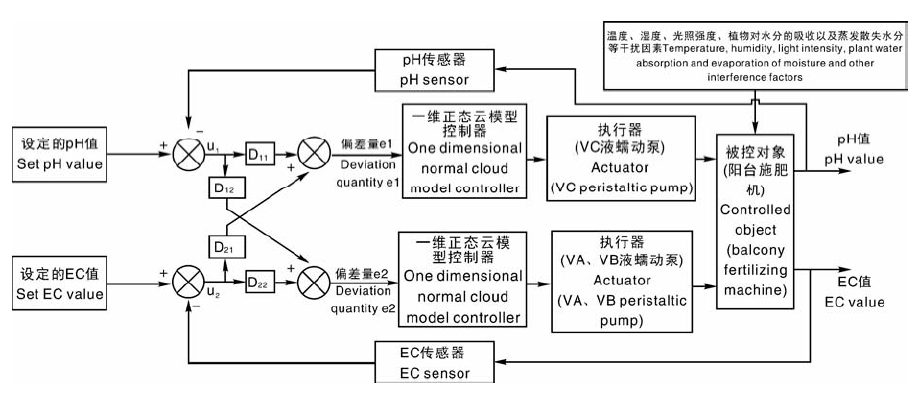 | 图4 pH值和EC值云模型控制器解耦控制方框图Fig.4 Block diagram of decoupling control process of pH and EC cloud model controller |
由于施肥过程中EC值和pH值的调节不仅相互影响, 还受众多不确定性因素的影响, 如:VA、VB、VC液必须等充分搅拌全部溶解才能加入第二种肥料, 否则过程中可能会发生溶液结晶、沉淀等, 从而导致一种营养液加入完成等待另一种营养液加入后的EC值和pH值并未按照设定值来变化; 植物本身对营养物质的吸收; 温度、湿度和光照等因素对溶液EC值和pH值的影响。故此, 本研究在推理系统中引入云模型的概念。云模型是一种定性概念与其定量表示之间的不确定性转换模型, 可同时反映所描述对象的模糊性和随机性。
本研究控制pH值和EC值的准则是调节量越接近设定值, 相关蠕动泵的开启时间越小。本研究的重点是处理pH和EC的解耦控制, 因此, 对于外界环境因素的影响在本研究中暂忽略不计, 即采用一维多规则云模型映射推理函数, 通过理论分析并结合对控制系统的研究, 建立施肥机pH值和EC值控制云模型系统的控制规则。规则中显示模糊语言值, 利用云模型将模糊语言值表达的定性知识转化为对象的定性知识。规则云模型推理过程:取L=5(L为规则数), 定义输入云模型集合、输出云模型集合。设pH调节值和EC调节值的输入云模型集合A论域为S=[-1, 1], 营养液和酸液的输出云模型集合B论域为W=[-1, 1]。
A1=“ 偏差负大” =(-1, 0.2, 0.001);
A2=“ 偏差负小” =(-0.5, 0.2, 0.001);
A3=“ 偏差为零” =(0, 0.2, 0.001);
A4=“ 偏差正小” =(0.5, 0.2, 0.001);
A5=“ 偏差正大” =(1, 0.2, 0.001)。
B1=“ 控制量负大” =(-1, 0.2, 0.001);
B2=“ 控制量负小” =(-0.5, 0.2, 0.001);
B3=“ 控制量为零” =(0, 0.2, 0.001);
B4=“ 控制量正小” =(0.5, 0.2, 0.001);
B5=“ 控制量正大” =(1, 0.2, 0.001)。
定义一维云模型推理规则, 表示如下:
If A=Ai, then B=Bi。
在一总容积为500 mL的纯净水溶液中分别添加营养液调节EC值和酸液调节pH值, 观察两者之间的变化关系, 实验环境温度为18.8 ℃, 数据记录见表1和表2。
| 表1 调节EC值对pH值的影响 Table 1 Effect of EC value adjustment on pH value |
| 表2 调节pH值对EC值的影响 Table 2 Effect of pH value adjustment on EC value |
一般灌溉用水的EC值要求< 0.8 mS· cm-1, 植物生长最理想的EC值通常在1.2~1.8 mS· cm-1之间, 最高不宜超过2.5 mS· cm-1。大多数花卉植物生长最适宜的pH值范围在5.5~6.5之间, 因为在这个范围内有效养分含量最高, 有利于植物吸收利用。采集使EC值从0~3 mS· cm-1变化的营养液添加量, 以及相对应的pH值变化数据进行曲线拟合, 如图5所示。另采集不同酸液添加量下溶液pH值与EC值相应变化的数据进行曲线拟合, 如图6所示。
 | 图5 营养液添加量对EC值和pH值的影响Fig.5 Effect of nutrient solution addition on EC and pH value |
 | 图6 酸液添加量对pH值和EC值的影响Fig.6 Effect of acid addition on pH and EC value |
由实验数据可知二者之间存在耦合关系:
Y11=0.23X1+0.45;
Y12=-0.0037
Y21=-0.031
Y22=0.00094
Y1=Y11+Y22;
Y2=Y12+Y21。
本研究以水培种植黄瓜为例, 由某农业公司提供的种植数据可知:黄瓜生长适宜的pH环境为5.5~7.2; 出芽期为5 d, 定植期为20~25 d, 日株用肥标准EC值宜控制在1.5 mS· cm-1; 挂果期为30~35 d, 日株用肥标准EC值宜控制在1.8~2.1 mS· cm-1; 盛果期为60 d, 日株用肥标准EC值宜控制在2.1~2.8 mS· cm-1。
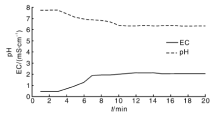
基于上述数据, 以挂果期的黄瓜为例, 分别使EC值控制在2.0 mS· cm-1, pH值控制在6.3。利用本研究所提出的解耦方法, 通过计算得出营养液和酸液调节量, 采用云模型解耦控制器进行调节控制, 对调节过程进行数据记录, 如图7所示。阳台蔬菜机盛水总体积为10 L, 通过计算得出需添加的营养液和酸液量并开始添加, 加液完成后开启搅拌泵进行搅拌, 采用蠕动泵加液, 5 V供电下滴落速度0.315 mL· s-1, 首次添加营养液和酸液时由于调节量大, 时间会比较长, 粗调完成后, 采集pH和EC值数据, 通过云模型控制器进行下一步细调, 最终可以观察到EC值与pH值调节精准, EC值稳定在2.0 mS· cm-1左右, pH值稳定在6.3左右, 误差分别控制在2%和5%。
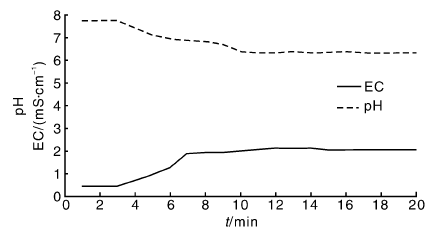 | 图7 云模型控制器调节肥液效果的实时数据图Fig.7 Real-time data of adjustment by cloud model controller |
考虑到施肥过程中外界温度、湿度、光照强度、植物对水分的吸收以及蒸发散失水分等因素的影响, 本研究采用云模型推理控制器实现肥水比例的在线调节功能, 根据植物的不同生长阶段自动调控肥水比例, 并且采用静态解耦方式解决pH和EC之间的耦合关系, 实现肥水比例的在线精准调节。验证实验显示, 本研究所提出的方案能有效解决原施肥系统存在的超调量大、调节时间长、各路营养液配比波动大、调配误差大等问题, 使肥水的pH、EC值控制在预定范围内, 按照植物生理需求进行营养供给。研究成果对于改善无土栽培植物品质, 提高肥料利用率, 节约成本等均有积极意义, 并可为自动化、智能化农业发展提供借鉴与参考。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|