{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于小区育种路径自对齐的小麦小区播种机改进
[王浩1, 2 , 唐勇伟2, *  , 董振振
, 董振振1, 2 , 王茂励2 , 赵景波1 ]
, 董振振|
|


作者简介:(1995—),男,山东青岛人,硕士研究生,研究方向为智能农机控制系统的研发。E-mail:785535230@qq.com
育种专家在进行小麦小区育种时,需要精准地对播种区域进行划分。但传统小麦小区播种机在播种过程中,各小区各行无法精准对齐,导致育种区域混乱,影响育种效果。为了解决小麦小区播种路径精准对齐的问题,本文在长期实验的基础上,将北斗卫星定位与小麦小区育种相结合。首先,获取播种机经纬度,通过建立相对坐标系,构建播种机的小区路径模型,得到规划的路径,取代了传统人工画线的过程。使用本文提出的方法进行小麦小区播种,在5 cm的误差范围内,播种准确度提高了32%。同时,考虑到农田作业环境复杂和人工驾驶的能力有限,北斗卫星定位本身也存在厘米级的误差,为了进一步提高小区路径规划的精准度,本文提出了一种算数平均值滤波与卡尔曼滤波相融合的算法,在相对坐标系下,对基准路径的斜率值进行迭代递推处理。经实验,使用算数平均值滤波与卡尔曼滤波相融合的算法,能有效地对实际计算的斜率值进行修正,最小的修正幅度为20.1%,最大的修正幅度达到4 871.4%。本文研究结果可为北斗卫星定位在小区播种机路径精准规划提供参考。
Breeding experts need to accurately divide the sowing areas in wheat plot breeding. However, in the sowing process of the traditional wheat plot planter, the lines in each plot cannot be aligned precisely, leading to confusion in the breeding area and affecting the breeding effect. In order to solve the problem of precise alignment of the planting path in wheat plots, Beidou satellite positioning was combined with wheat plot breeding on the basis of long-term experiments. Firstly, the longitude and latitude of the planter was obtained, and the plot path model of the planter was built through the establishment of relative coordinate system to obtain the planned path, which replaced the traditional manual line drawing process. Using the method proposed in this paper, the sowing accuracy of wheat plot was increased by 32% within the error range of 5 cm. At the same time, considering the complexity of farmland operation environment and limited ability of manual driving, Beidou satellite positioning itself also had centimeter-level error. In order to further improve the accuracy of path planning, this paper put forward a kind of arithmetic average value filtering and the algorithm of Kalman filtering fusion. The fused algorithm performed iterative recursive processing on the slope value of the reference path in the relative coordinate system. Through experiments, the arithmetic mean filtering and Kalman filtering combined algorithm could effectively correct the slope value of the actual calculation, with the minimum correction range of 20.1% and the maximum correction range of 4 871.4%. The research results in this paper could provide reference for the accurate planning of the Beidou satellite positioning in the planting path.
目前, 在我国小麦小区育种过程中, 最大的难度在于精准地控制小区长度、间隔长度、邻行小区位置。为了解决育种过程中的对齐问题, 一般采用在地面人工画线, 来对小区位置进行限制。对于大规模播种来说, 这种工作方式的工作量巨大, 并且人工操作误差大。中国北斗卫星导航系统(BeiDou Navigation Satellite System, BDS)由5颗静止轨道卫星和30颗非静止轨道卫星组成, 是中国自行研制的全球卫星导航系统[1]。是继美国全球定位系统(GPS)、俄罗斯格洛纳斯卫星导航系统(GLONASS)之后第三个成熟的卫星导航系统。北斗卫星定位因其开放性和准确性而被广泛应用于农业工程[2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12]。本文将北斗卫星定位应用于小麦小区播种机上, 以确定播种机的实时经纬度, 通过建立相对坐标系, 将播种机的位置置于数学模型中, 将人工画线替换为数学模型的计算, 从而实现精准的小区路径对齐控制。在建立数学模型的过程中, 最为关键的过程是确定过原点的两条边界线的线性方程, 建立线性方程就需要知道此方程的斜率。考虑到北斗卫星导航本身会有厘米级的误差[12], 人工驾车也无法完全保证路径笔直, 如果只采用行走路径中的某一点和原点, 两点构成一条直线, 那产生的误差将会不可估计。卡尔曼滤波作为应用广泛的噪声处理工具[13, 14, 15, 16, 17, 18, 19, 20], 通过逐层递归的方式进行线性滤波, 仅需利用前一个采样周期的估计值加上当前的测量值就能够对当前状态进行准确地估计, 状态方程完整地反映出了被估计量的变化规律。把最初得到的一组经纬度在相对坐标系中进行计算, 得到的基准路径数学模型的初始斜率值, 作为卡尔曼滤波第一个采样周期的估计值, 将之后计算得到的斜率值作为测量值进行迭代处理, 得到最终的最优值。
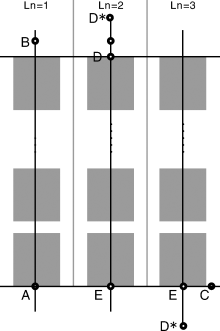
在小麦小区育种中, 要求对小区进行三个方面的对齐:在同一行内, 小区长度对齐; 小区与小区之间的间隔对齐; 各行与各行小区、间隔也要一一对齐。小区长度和小区间隔的对齐, 是通过北斗定位的经纬度, 来直接计算距离。本文主要解决的是行与行的小区、间隔一一对齐问题。如图1所示, 为了能够通过北斗卫星定位自动对齐小区, 需要先确定并获得两条基准路径AB和AC。获得基准路径后, 沿着AB路径进行第一行小区播种, 播种完成后, 将播种机停到D* 点附近位置, 此时得到D* 点经纬度, 通过小区路径模型的计算, 可以得到此时的终点E的经纬度。此时第二行的路径已经完成规划, 但因为D* 点是任意选择的, 为了保证第二行小区的开始位置, 是第一行小区的结束位置的平移点, 要计算播种开始点D的位置。通过图1可以得知D* 点到E点, 包含了n个小区、n-1个间隔以及D* 到D的距离。因此D* 到D点的计算公式为:
dis(DD* )=[dis(ED* )+dis(JG)]%[dis(XQ)+dis(JG)]。 (1)
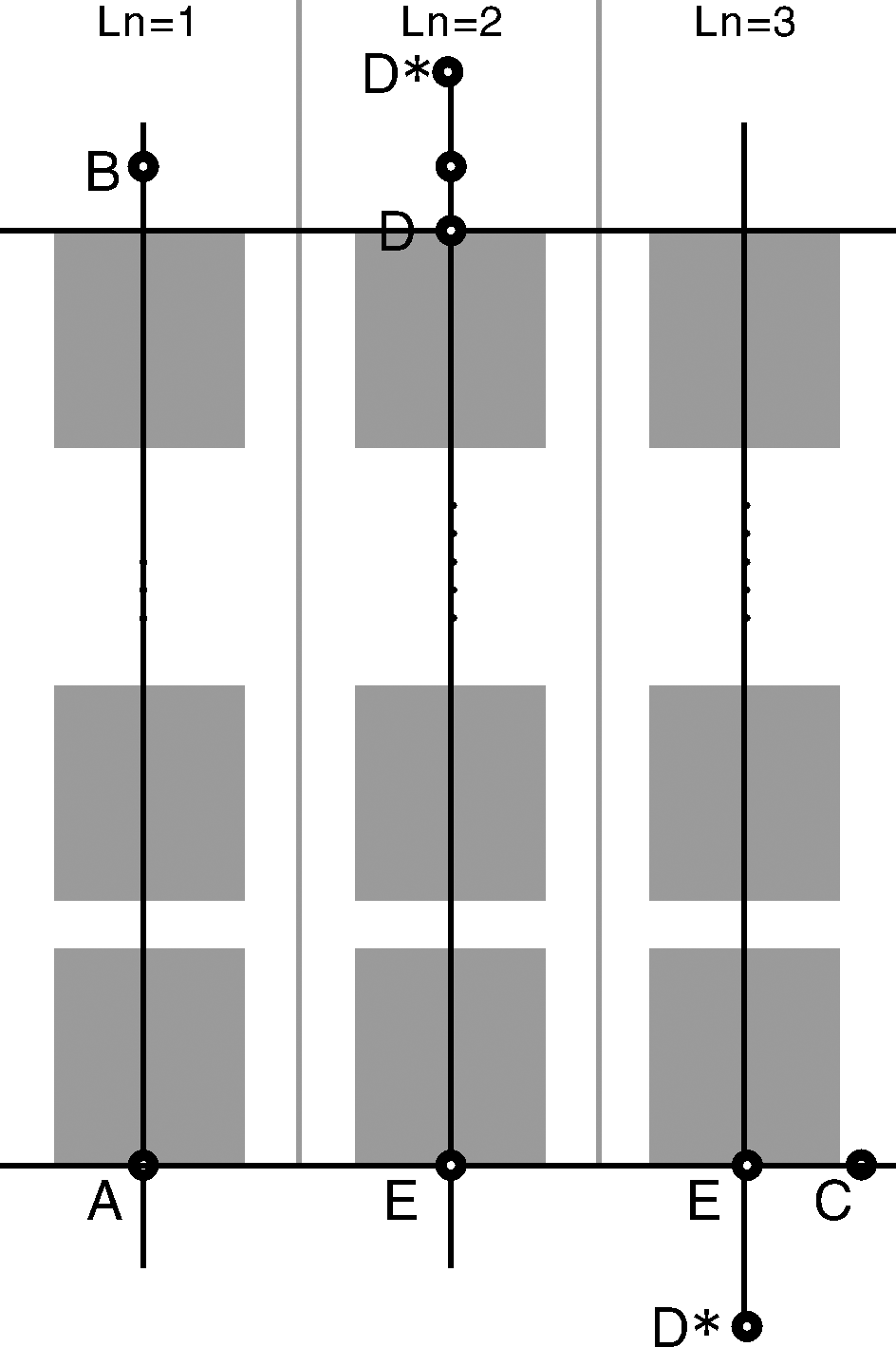 | 图1 小区播种路径自对齐示意图Fig.1 Schematic diagram of plot seeding path alignment |
式中:dis(DD* )为D* 点到D点的距离, m; dis(ED* )为D* 点到E点的距离, m; dis(JG)为小区间隔的长度, m; dis(XQ)为小区的长度, m。
当第二行播种完毕后, 将播种机停到第三行D* 点附近位置, 此时得到D* 点经纬度。通过相对坐标系计算出E点经纬度。当播种机从D* 点出发后, 实时计算当前位置与E点的距离, 当距离为0 m时, 播种工作开始。之后的播种过程中, 偶数行和第二行的工作方式相同, 奇数行和第三行的工作方式相同, 完成了小麦小区播种路径自对齐的方案设计。
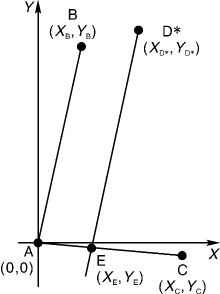
小区路径模型的建立, 是依赖于北斗卫星定位, 接收到小麦播种机实时的经纬度信息。考虑到经线和纬线是相互垂直, 本文以纬线为X轴, 经线为Y轴, 两条小区播种的基准路径的交点A为原点, 建立相对直角坐标系, 见图2。假设A点的经纬度为(Lat A, Lon A), B点的经纬度为(Lat B, Lon B)。要将B点转化为相对坐标系中的点, 需要将B点分别投影到X轴和Y轴, 通过计算与原点的距离, 得到坐标。B点在X轴的投影的经纬度为(Lat B, Lon A), 则投影点和A点的经度差为0, 纬度差为:
diffLat=LatA-LatB。 (2)
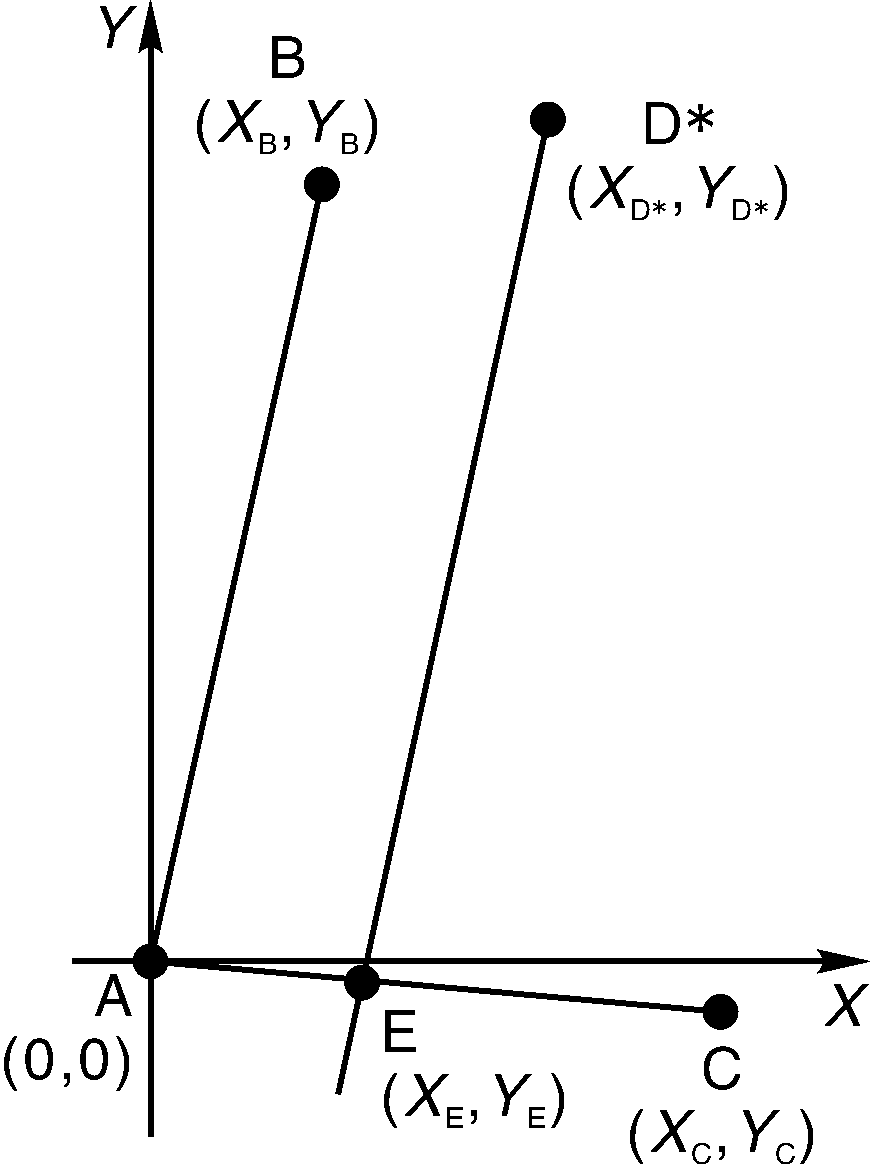 | 图2 基于经纬度的相对坐标系Fig.2 Relative coordinate system based on latitude and longitude |
式中:LatA为A点纬度的弧度值, rad; LatB为B点纬度的弧度值, rad; diffLat为A、B在X轴的投影点两点纬度弧度值的差值, rad。
根据地球表面任意两点的经纬度的距离计算公式:
式中:L为A、B在X轴的投影点两点间的距离, m; R为地球平均半径, m。
这里得到的距离L就是B点在相对坐标系下的横坐标XB。用同样的方法, B点在Y轴的投影的经纬度为(LatA, LonB), 则投影点和A的纬度差为0, 经度差为:
diffLon=LonA-LonB。 (4)
式中:LonA为A点经度的弧度值, rad; LonB为B点经度的弧度值, rad; diffLon为A、B在Y轴的投影点两点经度弧度值的差值, rad。
根据地球表面任意两点的经纬度的距离计算公式:
式中:L为A、B在Y轴的投影点两点间的距离, m; R为地球平均半径, m。
这里得到的距离L就是B点在相对坐标系下的纵坐标YB。
目前, 单点北斗卫星定位精度在米级, 精度不足以实现精准作业。为解决单点北斗卫星定位精度不够的问题, 通常会在作业点附近, 架设固定基站, 通过RTK技术来增强定位精度, 精度可达到厘米级。在实际播种机工作过程中, 由于农田环境复杂、人工驾驶水平有限等情况, 常常会出现车辆打滑、震动等问题, 导致车身位置出现偏移, 此时定位精度虽然达到要求, 但对于小区规划路径, 仍将产生较大的偏差。
由图2可知, 每一行小区的路径规划都是基于AB和AC两条基准路径进行的, 一旦两条基准路径的规划出现误差, 在之后对其他路径的计算过程中, 这个误差将会被无限放大。如果通过初始点和结束点, 两点确定一条直线, 那么一旦结束点的位置出现偏差, 就会导致整条基准路径发生偏移。为了解决这一问题, 本文提出算数平均值滤波与卡尔曼滤波相融合算法, 对基准路径进行修正。想要得到相对坐标系下直线AB的方程, 需要得到直线AB的斜率。通过公式(3)、(5)可以得到任意一点的坐标。则这一点与A点构成直线的斜率K, 可以通过公式:
K=
对于北斗卫星信号的接收频率为10 Hz, 也就是每0.1 s会接收到一帧格式为$GPGGA的北斗信号, 每次接收到当前点的经纬度后, 会把当前点转化成相对坐标系中的点, 计算此点与A点构成直线的斜率K。为了提高卡尔曼滤波的收敛速度, 本文通过提取第一秒内的10个斜率值, 使用算数平均值滤波对其处理, 提高初始值的准确度。得到的平均值作为卡尔曼滤波的第一个采样周期的估计值, 之后得到的斜率值作为观测值。
离散线性系统的卡尔曼模型由状态方程、节点观测方程、状态一步预测值以及更新方程组成, 具体如下[21]:
状态方程
X(k)=AX(k-1)+BU(k)+W(k)。 (7)
式中:X(k)为k时刻的系统状态; X(k-1)为k-1时刻的系统状态; U(k)为k时刻对系统的控制量; A、B— 系统参数; W(k)为过程噪声。
节点观测方程
Z(k)=HX(k)+V(k)。 (8)
式中:Z(k)为k时刻的测量值; H为测量系统的参数; V(k)为测量噪声。
首先利用系统的过程模型来预测系统下一状态, 设在k时刻的系统状态为X(k), 则可以根据系统模型, 由上一状态预测出现在状态, 由于我们认为播种机行走的过程是稳定准确的, 因此系数A为1; 本系统没有控制量, 系数B为0:
X(k|k-1)=X(k-1|k-1)。 (9)
式中:X(k|k-1)为k-1时刻的状态对k时刻状态的预测; X(k-1|k-1)为k-1时刻的最优斜率值。
此时系统的状态已经更新, 现在需要更新系统的误差估计协方差矩阵:
P(k|k-1)=P(k-1|k-1)+Q。 (10)
式中:P(k|k-1)为在k时刻由k-1时刻状态对此状态的预测; P(k-1|k-1)为k-1时刻的最优斜率值对应的误差估计协方差矩阵; Q为系统过程噪声的协方差。
通过得到预测结果P(k|k-1), 根据得到的现在状态的测量值进行修正, 得到最优的估计量:
X(k|k)=X(k|k-1)+Kg(k)* (Z(k)-HX(k|k-1))。 (11)
Kg(k)=
式中:X(k|k)为k时刻的最优斜率值; Kg(k)为卡尔曼增益。
此时, 得出的k时刻的最优斜率值, 为了让卡尔曼滤波器不断地进行下去, 我们需要更新k时刻的最优斜率值对应的k时刻的最优斜率值对应的误差估计协方差矩阵为
P(k|k)=(I-Kg(k)* H)* P(k|k-1)。 (13)
式中:P(k|k)为k时刻的最优斜率值对应的误差估计协方差矩阵; I为单位矩阵。
当系统进入k+1时刻时, P(k|k)扮演的角色就是式中P(k-1|k-1)。如此, 卡尔曼滤波根据上述的式子, 就可以不断迭代下去, 得到最终最优斜率值KAB和KAC。
通过卡尔曼滤波的迭代递推处理, 已经得到了基准路径直线AB和直线AC的最优斜率值KAB和KAC。由图2可知, 直线AB和直线AC经过原点, 因此, 其正比例函数为
yAB=KABX; (14)
yAC=KACX。 (15)
通过北斗卫星定位, 可以得到D* 点的经纬度, 通过式(3)、(5), 可以得到D* 点的坐标(
得到直线ED* 的函数方程后, 通过计算得到偶数行的播种终止点E, E点是直线ED* 与直线AC的交点, 通过联立方程
得到E点坐标
奇数行同样通过上式得到起始点E的坐标(XE, YE)。这样就完成了小区路径模型的建立。
为了验证算数平均值滤波与卡尔曼滤波相融合的算法对于基准路径的规划的修正作用, 我们选取了山东省德州市平原县的一处实验田。这里的土质与大多数北方地区的土质相同, 均为砂土。相较于南方黏性土地而言[21], 播种机在行走过程中, 出现打滑偏移的问题更为突出, 测量值的偏差会更明显。
在实验前, 我们首先人为规划出一条基准路径, 作为实验过程中的参照线, 这条参照线在相对坐标系下的斜率值为3。
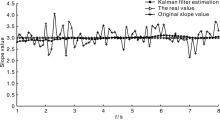
通过让播种机沿着参照线行走, 实时记录行走过程中的经纬度, 并把经纬度通过计算得到斜率值。统计回收的数据, 如图3所示, 发现与真实斜率值3相比, 直接通过经纬度来计算的斜率值, 有80%以上产生了10%的偏差; 相比于直接计算, 使用卡尔曼滤波进行迭代处理大约2 s后, 卡尔曼滤波的估计值已经接近真实值, 偏差量最大在5%以内。
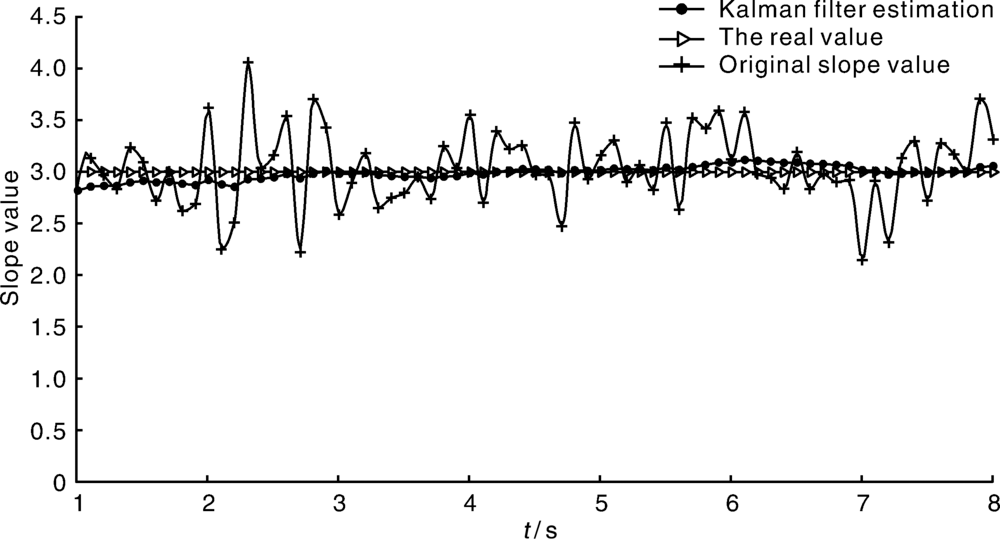 | 图3 基准路径斜率估计值与观测值Fig.3 Base path slope estimated and observed values |
考虑到播种机完成基础路径的行走时间通常在分钟级别上, 远超卡尔曼滤波的正常收敛时间。因此, 本文提出的模型实时性可得到保障。
如果采用两点确定一条直线的方式得到基准路径, 那么终止点的位置, 实际是无法估计位置的, 终止点的位置出现偏移的大小, 会直接影响播种机播种的面积偏移。假设真实斜率值为k1, 实际斜率值为k2, 则斜率对应的夹角角, rad; α 2为A点与终止点连线在相对坐标系中与X轴的夹角, rad。
α 1, α 2为
式中:α 1为参照线在相对坐标系中与X轴夹
偏移角α 为
α =|α 1-α 2|。 (20)
式中:α 为参照线在相对坐标系中和X轴夹角与实际终止点连线在相对坐标系中和X轴的夹角的差值, rad。
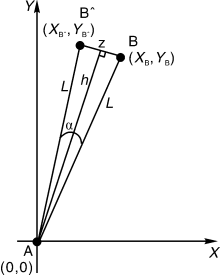
考虑到真实路径和偏移路径的长度相同为L, 因此构成了等腰三角形(图4)。按照等腰三角形的性质, 可以得到等腰三角形的高h和底边长z:
h=Lcos(α ); (21)
z=Lsin(α )。 (22)
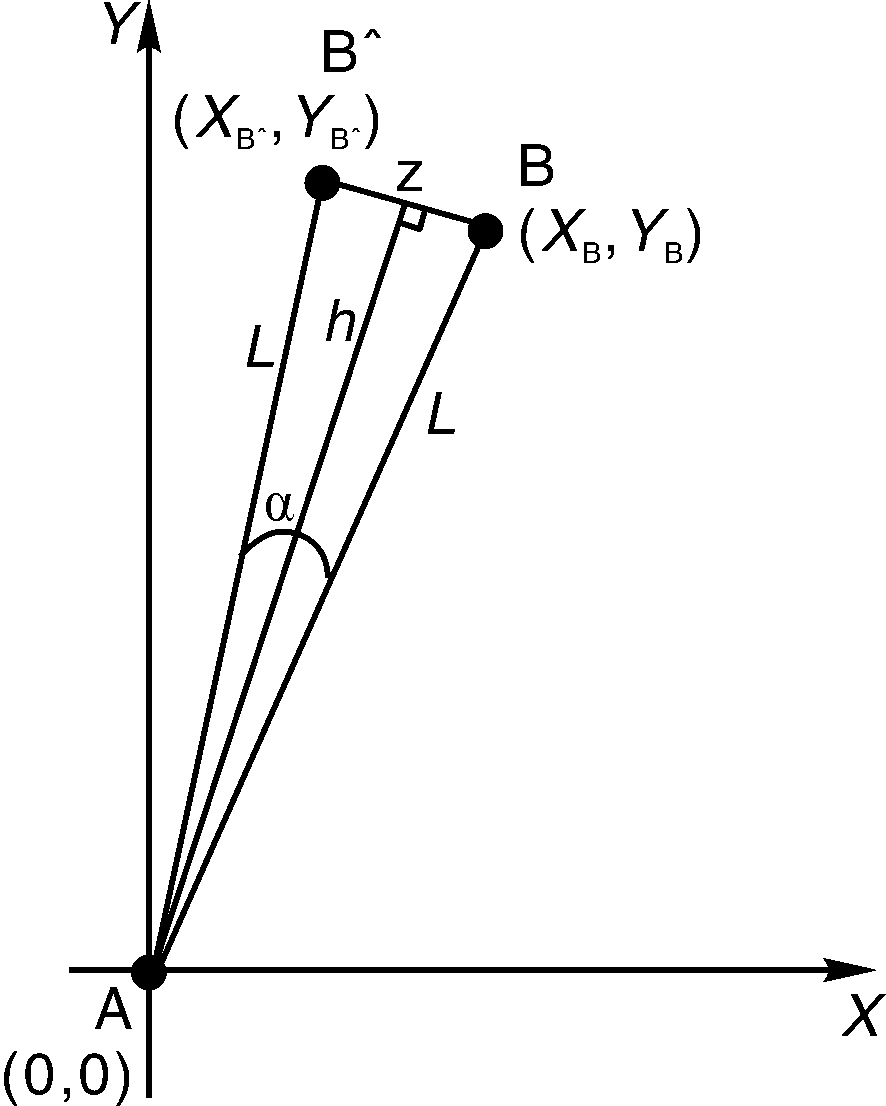 | 图4 路径偏移面积示意图Fig.4 Path offset area diagram |
式中:h为真实路径和偏移路径构成的等腰三角形的高长, m; z为真实路径和偏移路径构成的等腰三角形的底边长, m; L为真实路径和偏移路径构成的等腰三角形的腰长, m。
偏移面积为:
S=|L2sin(α )cos(α )|。 (23)
式中:S为真实路径和偏移路径构成的等腰三角形的面积, m2; 通过得到的偏移面积的计算公式(23), 选取了10组实际斜率值和卡尔曼估计值, 对其偏移面积进行计算, 见表1。
| 表1 偏移面积数值统计表 Table 1 Offset area numerical statistics |
通过对10组数据进行对比发现, 斜率的实际计算值与真实值的偏差量, 会直接反映到偏移面积上。而偏移面积的产生, 会对于小区路径的自对齐模型建立, 造成了较大的误差影响, 通过引入算数平均值滤波与卡尔曼滤波算法, 能有效地对实际计算的斜率值进行修正, 最小的修正幅度为20.1%, 最大的修正幅度达到4 871.4%, 并且由式(23)可知, 随着基准路径长度L的增加, 偏移面积的修正值将随之增加, 卡尔曼滤波的迭代递推处理, 效果更为显著。
为了验证小区路径模型是否对实际小区自对齐播种有所帮助, 本文选取了另外一台机械结构相同的播种机, 作为参照对象。其控制方式是通过安装在车轮上的编码器进行逻辑控制, 这种方式也是目前市面播种机最常用的播种方式。实验方式是两台播种机播种相同的路径, 分别放入不同颜色的小麦种子用作小区区分。人为划分出小区位置, 作为判断依据。使用这种实验方式, 每行20个小区, 进行10行作业, 共200个小区播种, 对每个小区小麦种子的偏移距离进行统计, 见表2。
| 表2 传统播种与小区路径自对齐模型偏差小区统计 Table 2 Traditional seeding and plot path alignment model deviation plot statistics % |
由于北斗本身的定位误差为3 cm, 故偏差小于3 cm以内的误差, 可以忽略。由统计结果可以发现, 传统播种机出现实际偏差的小区数量相对较多, 达到61.5%, 且超过5 cm以上的较大偏差小区, 达到了38%, 这对于实际育种来说, 会有比较明显的影响。对比而言, 基于北斗的小区路径规划的播种机, 出现实际偏差的小区数量明显减少, 只有7%, 且超过5 cm以上的较大偏差小区只有1%。通过路径规划进行育种, 对于小区的路径自对齐, 有较为显著的效果。
本文设计了一种基于北斗卫星定位的小区播种路径自对齐的算法, 采用接收到的10 Hz北斗卫星定位信息, 来计算得到相对坐标系下的坐标位置, 通过坐标位置, 来实现对于路径的精准规划, 经实验验证, 相较于传统播种方式, 播种精准度提高了54.5%。通过引入算数平均值滤波与卡尔曼滤波算法, 大幅度修正了基准路径的精准度, 并且随基准路径长度的增加, 修正幅度呈阶梯式增加, 确保了小区播种的基准线的准确。经过实验验证, 本文提到的方法, 对于小区播种的路径自对齐, 有着显著的规划作用, 并且适用于各类作物的小区播种。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|