浙江农业学报 ›› 2026, Vol. 38 ›› Issue (4): 798-808.DOI: 10.3969/j.issn.1004-1524.20250415
遥控式油茶果分层采收机设计与试验
刘祥龙( ), 饶洪辉(), 刘木华, 王邦进, 袁斌
), 饶洪辉(), 刘木华, 王邦进, 袁斌
江西农业大学 工学院 ,江西省现代农业装备重点实验室 江西 南昌 330045
-
收稿日期:2025-05-29出版日期:2026-04-25发布日期:2026-05-08 -
作者简介:饶洪辉,E-mail:rhh58@sohu.com
刘祥龙,研究方向为农业机械。E-mail:1010962430@qq.com -
通讯作者:饶洪辉 -
基金资助:国家重点研发计划(2022YFD2202104);国家自然科学基金(52065207)
Design and experiment of remote-controlled layered harvester for Camellia oleifera fruit
LIU Xianglong(), RAO Honghui(), LIU Muhua, WANG Bangjin, YUAN Bin
Key Laboratory of Modern Agricultural Equipment of Jiangxi Province ,School of Engineering, Jiangxi Agricultural University Nanchang 330045, China
-
Received:2025-05-29Published:2026-04-25Online:2026-05-08 -
Contact:RAO Honghui
摘要:
针对当前油茶果振动采摘易损伤树枝,且采摘机械操作较复杂等问题,本研究设计了一种遥控式油茶果分层采收机。为实现底盘的遥控操作,采用液压马达驱动方案,分析了胶辊组调节范围,设计了齿轮齿带式胶辊间距调节机构,建立了采摘头姿态调节系统,对气弹簧在采摘头姿态调节过程中的缓冲作用进行了分析。以油茶果采净率和花苞损伤率为指标,以胶辊间距、分层深度、分层厚度和胶辊转速为因素,进行四因素三水平正交试验,运用加权平均法,计算各组采摘参数的加权平均得分,得到最优参数组合为胶辊间距18 mm、分层深度700 mm、分层厚度260 mm、胶辊转速50 r·min-1。在此工况下,油茶果采净率为95.20%,花苞损伤率为6.90%。结果表明,遥控式油茶果分层采收机能满足油茶果采摘技术要求,可为油茶果采收机的研制提供参考。
中图分类号:
引用本文
刘祥龙, 饶洪辉, 刘木华, 王邦进, 袁斌. 遥控式油茶果分层采收机设计与试验[J]. 浙江农业学报, 2026, 38(4): 798-808.
LIU Xianglong, RAO Honghui, LIU Muhua, WANG Bangjin, YUAN Bin. Design and experiment of remote-controlled layered harvester for Camellia oleifera fruit[J]. Acta Agriculturae Zhejiangensis, 2026, 38(4): 798-808.
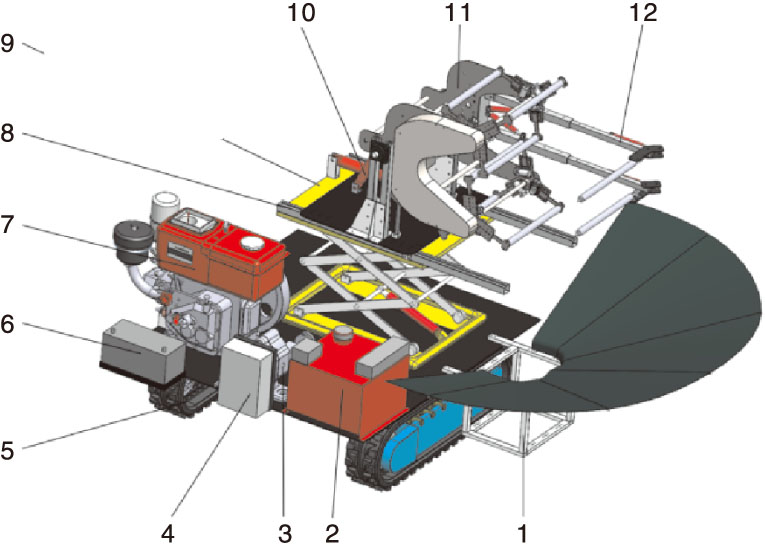
图1 遥控式油茶果分层采收装置结构简图 1,收集机构;2,液压系统;3,液压泵;4,控制箱;5,底盘;6,蓄电池;7,柴油机;8,往复机构;9,升降平台;10,俯仰机构;11,采摘头;12,分层机构。
Fig.1 Structural diagram of remote-controlled layered picking device for camellia fruit 1, Collection mechanism; 2, Hydraulic system; 3, Hydraulic pump; 4, Control box; 5, Chasais; 6, Storage battery; 7, Diesel engine; 8, Reciprocating mechanism; 9, Lifting platform; 10, Pitching mechanism; 11, Picking head; 12, Layering mechanism.
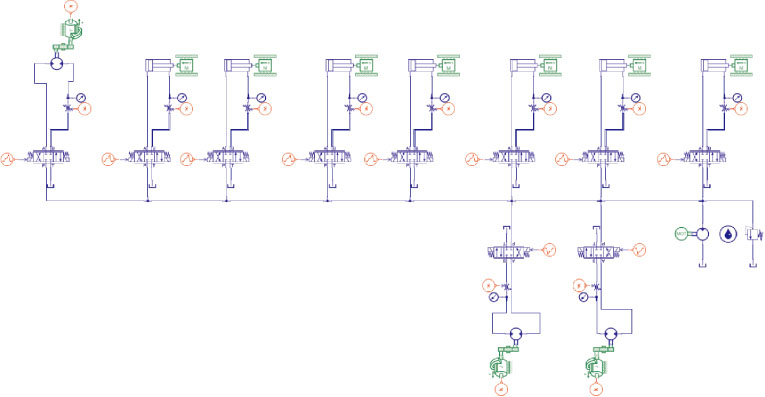
图2 液压系统原理图
Fig.2 Hydraulic system schematic diagram
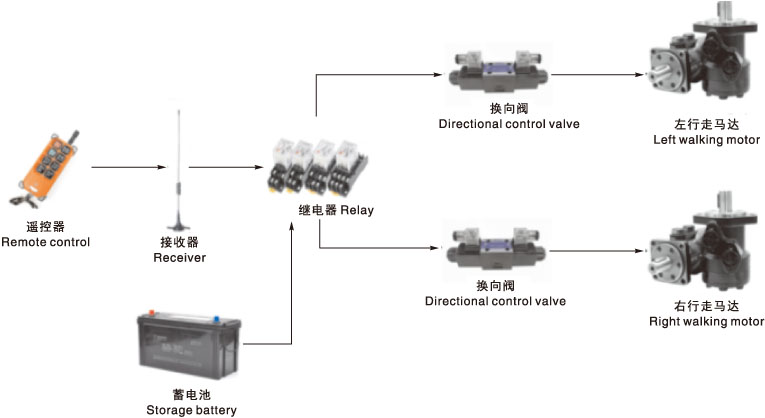
图3 底盘遥控系统示意图
Fig.3 Schematic diagram of chassis remote control system
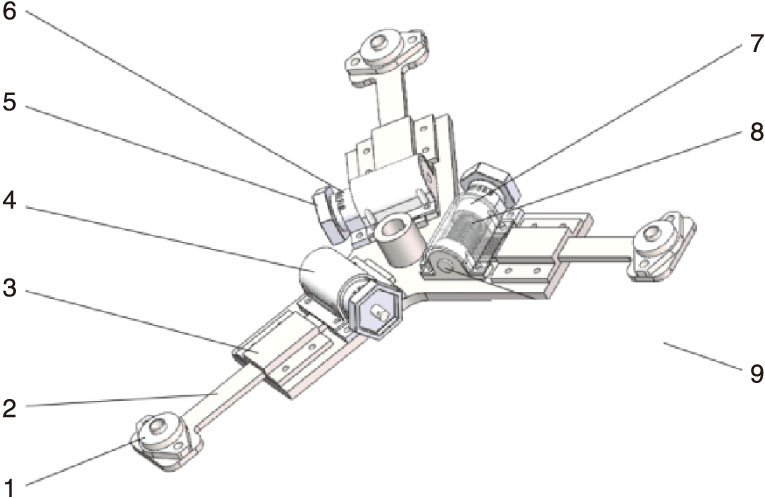
图4 间距调节机构结构图 1,胶辊轴承;2,齿带连接板;3,固定槽;4,封装壳体;5,调节把手;6,调节刻度座;7,带座轴承;8,小齿轮;9,转动轴。
Fig.4 Structural diagram of spacing adjustment mechanism 1, Bearings used for installing rubber rollers; 2, Connecting plate with toothed belt; 3, Fixed slot; 4, Package case; 5, Adjustment handle; 6, Scale holder ofr adjustment; 7, Pillow block bearing; 8, Pinion; 9, Rotating shaft.
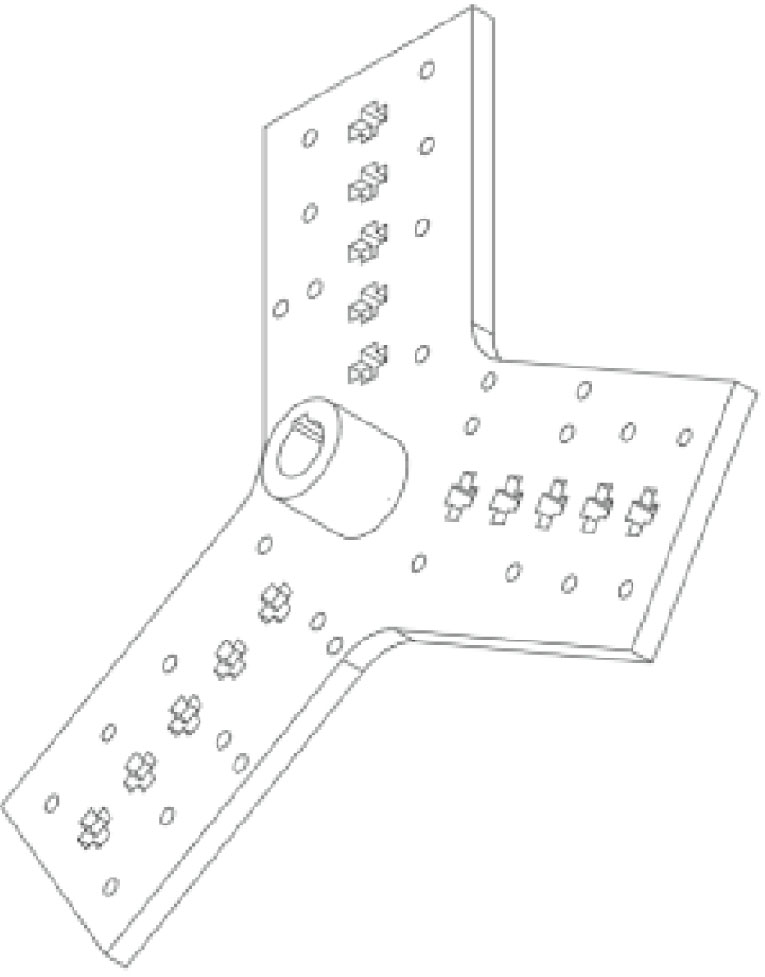
图5 旋转盘三维图
Fig.5 Three-dimensional diagram of the rotating disc
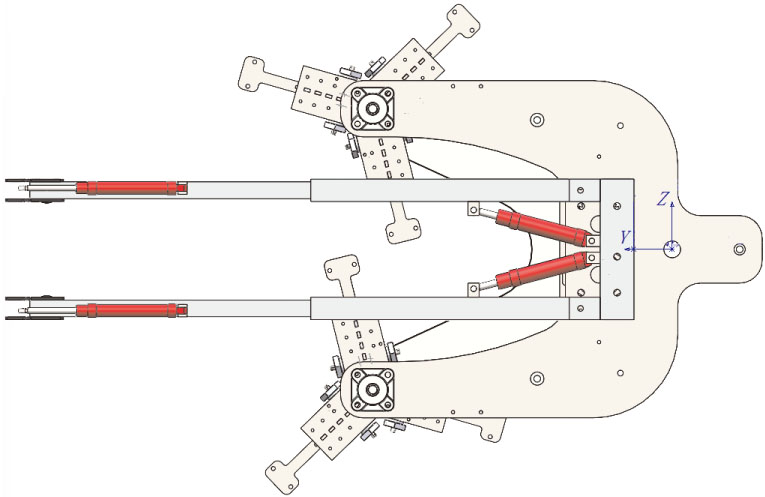
图6 采摘头质心及坐标位置
Fig.6 Center of mass and coordinate position of the picking head
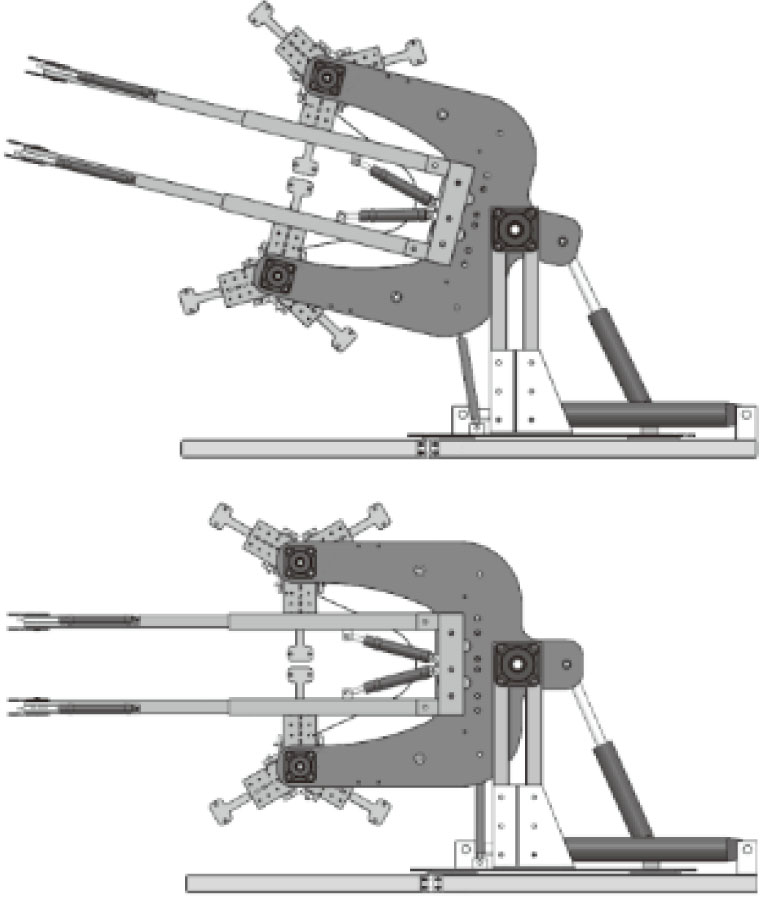
图7 采摘头工作时仰起状态(上)和初始状态(下)示意图
Fig.7 Operating schematic diagram of picking head in the raised state (top) and initial state (bottom)
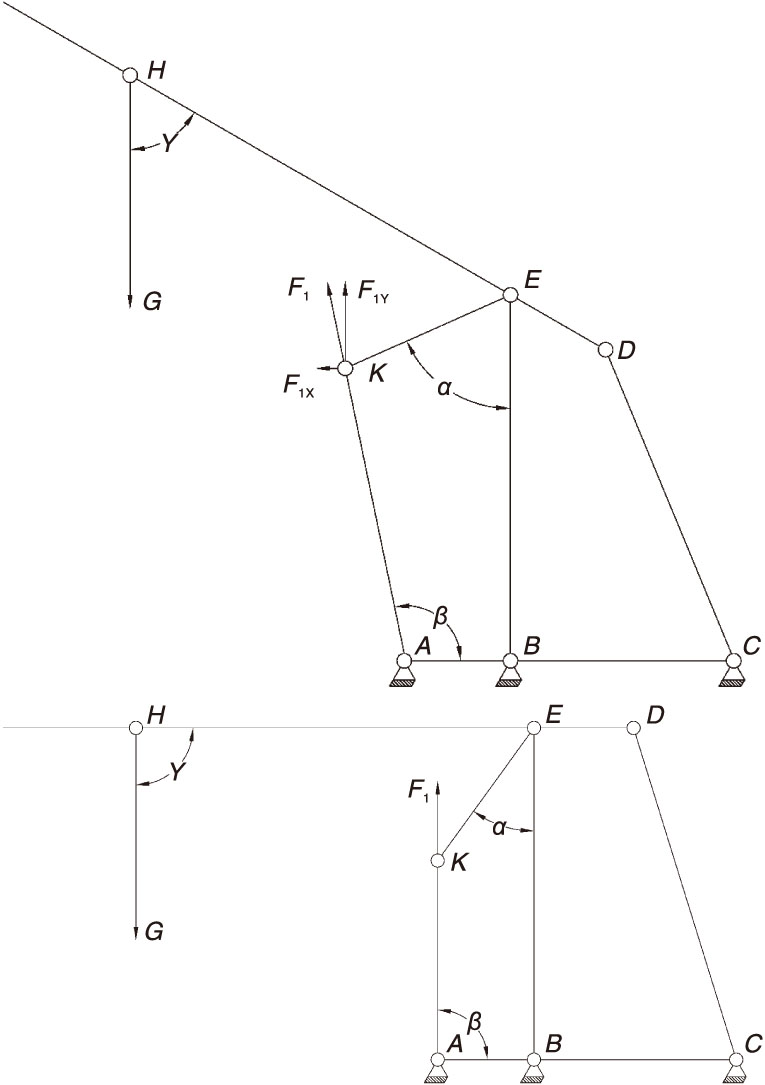
图8 俯仰机构仰起状态(上)和初始状态(下)的几何模型
Fig.8 Geometric model of pitching mechanism in the raised state (top) and initial state (bottom)
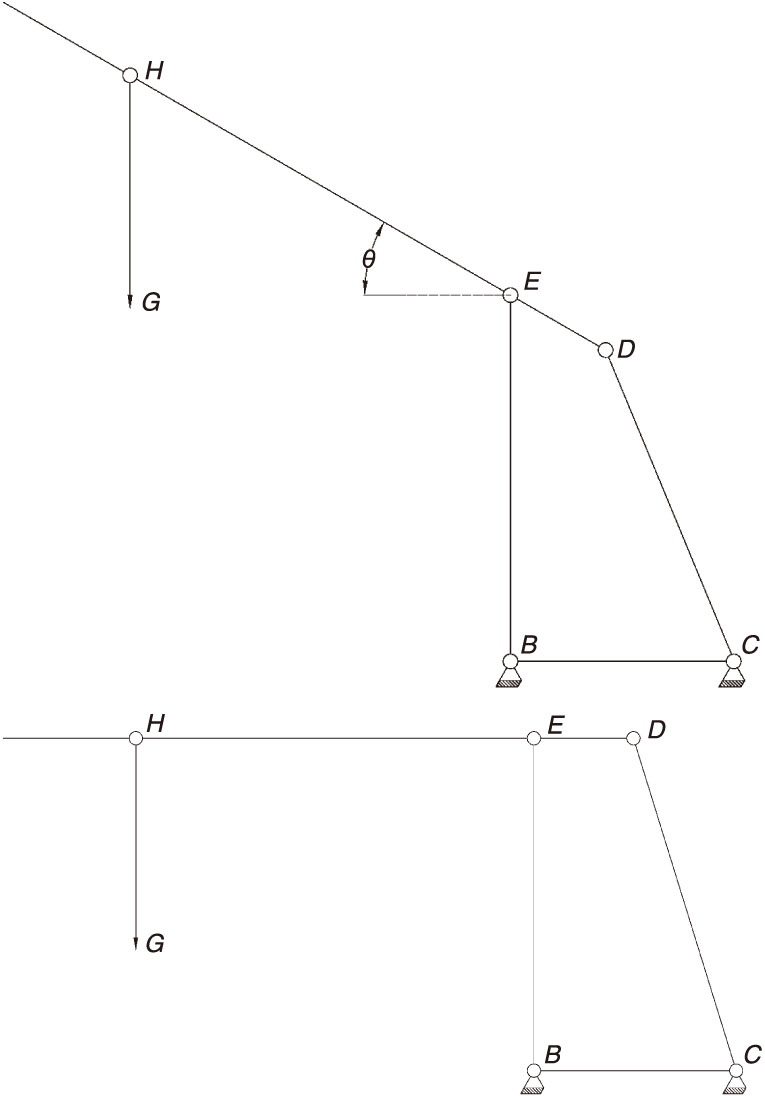
图9 无气弹簧缓冲的俯仰机构仰起状态(上)和初始状态(下)几何模型
Fig.9 Geometric model of the pitching mechanism without pneumatic spring in the raised state(top) and initial state(bottom)
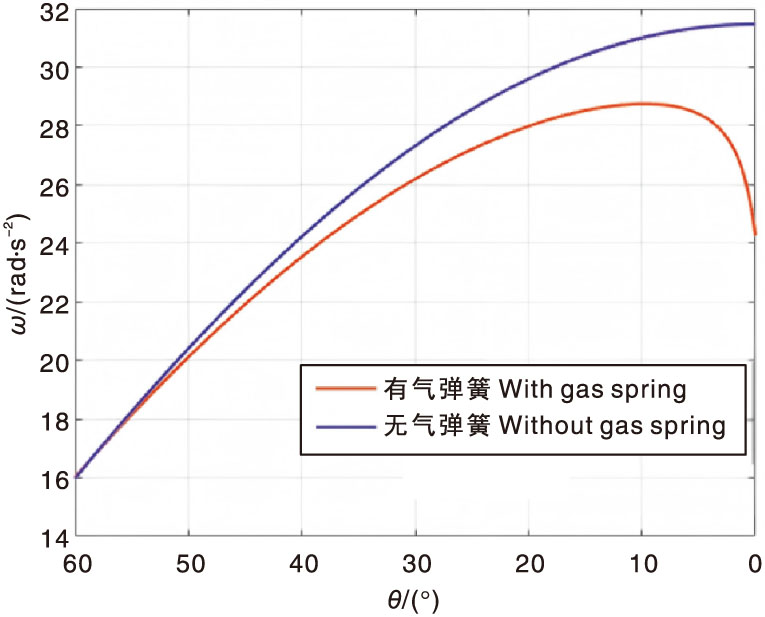
图10 俯仰机构角加速度(ω)随仰角(θ)变化规律
Fig.10 The variation law of augular acceleration of the pitching mechanism (ω) with elevation angle (θ)

图11 户外油茶果采摘试验照片
Fig.11 Photo of outdoor camellia fruit picking test
| 水平 Level | 各因素的设定值Setting value of factors | |||
|---|---|---|---|---|
| (A)胶辊间 距/mm Rubber roller specing/mm | (B)分层深 度/mm Layer depth/mm | (C)分层厚 度/mm Layer thickness/ mm | (D)胶辊转速/ (r·min-1) Rubber roller speed/(r· min-1) | |
| 1 | 15 | 500 | 260 | 40 |
| 2 | 18 | 600 | 310 | 50 |
| 3 | 21 | 700 | 360 | 60 |
表1 试验因素编码
Table 1 Test factors and coding
| 水平 Level | 各因素的设定值Setting value of factors | |||
|---|---|---|---|---|
| (A)胶辊间 距/mm Rubber roller specing/mm | (B)分层深 度/mm Layer depth/mm | (C)分层厚 度/mm Layer thickness/ mm | (D)胶辊转速/ (r·min-1) Rubber roller speed/(r· min-1) | |
| 1 | 15 | 500 | 260 | 40 |
| 2 | 18 | 600 | 310 | 50 |
| 3 | 21 | 700 | 360 | 60 |
| 试验号 Test No. | 各因素的水平 Levels of factors | 油茶果采净率/% Harvest rate of camellia fruit/% | 花苞损伤率/% Flower bud damage rate/% | 加权得分/% Weighted score/% | |||
|---|---|---|---|---|---|---|---|
| A | B | C | D | ||||
| 1 | 1 | 1 | 1 | 1 | 92.12 | 9.80 | 91.16 |
| 2 | 1 | 2 | 2 | 2 | 96.88 | 12.63 | 92.13 |
| 3 | 1 | 3 | 3 | 3 | 91.36 | 11.03 | 90.17 |
| 4 | 2 | 1 | 2 | 3 | 95.29 | 15.79 | 89.75 |
| 5 | 2 | 2 | 3 | 1 | 90.40 | 4.16 | 93.12 |
| 6 | 2 | 3 | 1 | 2 | 95.20 | 6.90 | 94.15 |
| 7 | 3 | 1 | 3 | 2 | 88.80 | 7.50 | 90.65 |
| 8 | 3 | 2 | 1 | 3 | 86.40 | 9.70 | 88.35 |
| 9 | 3 | 3 | 2 | 1 | 78.20 | 6.25 | 85.98 |
表2 试验方案与结果
Table 2 Test design and results
| 试验号 Test No. | 各因素的水平 Levels of factors | 油茶果采净率/% Harvest rate of camellia fruit/% | 花苞损伤率/% Flower bud damage rate/% | 加权得分/% Weighted score/% | |||
|---|---|---|---|---|---|---|---|
| A | B | C | D | ||||
| 1 | 1 | 1 | 1 | 1 | 92.12 | 9.80 | 91.16 |
| 2 | 1 | 2 | 2 | 2 | 96.88 | 12.63 | 92.13 |
| 3 | 1 | 3 | 3 | 3 | 91.36 | 11.03 | 90.17 |
| 4 | 2 | 1 | 2 | 3 | 95.29 | 15.79 | 89.75 |
| 5 | 2 | 2 | 3 | 1 | 90.40 | 4.16 | 93.12 |
| 6 | 2 | 3 | 1 | 2 | 95.20 | 6.90 | 94.15 |
| 7 | 3 | 1 | 3 | 2 | 88.80 | 7.50 | 90.65 |
| 8 | 3 | 2 | 1 | 3 | 86.40 | 9.70 | 88.35 |
| 9 | 3 | 3 | 2 | 1 | 78.20 | 6.25 | 85.98 |
| 因素 Factor | 油茶果采净率Harvest rate of camellia fruitt | 花苞损伤率Flower bud damage rate | ||||||
|---|---|---|---|---|---|---|---|---|
| k1 | k1 | k1 | R | k1 | k1 | k1 | R | |
| A | 93.45 | 93.63 | 84.47 | 9.16 | 11.15 | 8.95 | 7.82 | 3.33 |
| B | 92.07 | 91.23 | 88.25 | 3.82 | 11.03 | 8.83 | 8.06 | 2.97 |
| C | 91.24 | 90.12 | 90.19 | 1.12 | 8.80 | 11.56 | 7.56 | 4.00 |
| D | 86.91 | 93.63 | 91.02 | 6.72 | 6.74 | 9.01 | 12.17 | 5.43 |
表3 极差分析结果
Table 3 Range analysis results Unit: %
| 因素 Factor | 油茶果采净率Harvest rate of camellia fruitt | 花苞损伤率Flower bud damage rate | ||||||
|---|---|---|---|---|---|---|---|---|
| k1 | k1 | k1 | R | k1 | k1 | k1 | R | |
| A | 93.45 | 93.63 | 84.47 | 9.16 | 11.15 | 8.95 | 7.82 | 3.33 |
| B | 92.07 | 91.23 | 88.25 | 3.82 | 11.03 | 8.83 | 8.06 | 2.97 |
| C | 91.24 | 90.12 | 90.19 | 1.12 | 8.80 | 11.56 | 7.56 | 4.00 |
| D | 86.91 | 93.63 | 91.02 | 6.72 | 6.74 | 9.01 | 12.17 | 5.43 |
| [1] | 周鸿媛, 余函. 武陵山区油茶产业化发展的模式与路径选择: 以重庆市酉阳县为例[J]. 南方农机, 2025, 56(6): 1-4. |
| ZHOU H Y, YU H. Development modes and path selection of Camellia oleifera industrialization in Wuling Mountain area: a case study of Youyang County, Chongqing[J]. China Southern Agricultural Machinery, 2025, 56(6): 1-4. | |
| [2] | 伍德林, 杨俊华, 刘芸, 等. 我国油茶果采摘装备研究进展与趋势[J]. 中国农机化学报, 2022, 43(1): 186-194. |
| WU D L, YANG J H, LIU Y, et al. Research progress and trend of camellia fruit picking equipment in China[J]. Journal of Chinese Agricultural Mechanization, 2022, 43(1): 186-194. | |
| [3] | 寇欣, 汤晶宇, 曲振兴, 等. 油茶果初加工技术装备现状及研发建议[J]. 中国油脂, 2025, 50(11):141-146. |
| KOU X, TANG J Y, QU Z X, et al. Status and research suggestion on primary processing technology and equipment for Camellia oleifera fruit[J]. China Oils and Fats, 2025, 50(11):141-146. | |
| [4] | 甄乾广, 王金鹏, 周宏平, 等. 旋拧式油茶果采摘末端执行器的研制与试验[J]. 林业工程学报, 2025, 10(3): 138-145. |
| ZHEN Q G, WANG J P, ZHOU H P, et al. Development and experiment of screw end effector for picking camellia fruit[J]. Journal of Forestry Engineering, 2025, 10(3): 138-145. | |
| [5] | 陈佳, 康丽春, 饶洪辉, 等. 侧边扫入式油茶果采摘装置设计与试验[J]. 中国农机化学报, 2024, 45(11): 35-41. |
| CHEN J, KANG L C, RAO H H, et al. Design and experiment of camellia fruit picking device with side sweep[J]. Journal of Chinese Agricultural Mechanization, 2024, 45(11): 35-41. | |
| [6] | 涂恒铭, 饶洪辉, 李涛, 等. 轻简式油茶侧枝夹持振动采摘装置研究[J]. 中国农机化学报, 2024, 45(10): 33-38. |
| TU H M, RAO H H, LI T, et al. Research on vibration picking device for light and simple Camellia oleifera lateral branches[J]. Journal of Chinese Agricultural Mechanization, 2024, 45(10): 33-38. | |
| [7] | 杨家林. 液压驱动式油茶果分层采摘机设计与试验[D]. 南昌: 江西农业大学, 2024. |
| YANG J L. Design and test of hydraulic driven Camellia oleifera layered picking machine[D]. Nanchang: Jiangxi Agricultural University, 2024. | |
| [8] | 陈永忠. 我国油茶科技进展与未来核心技术[J]. 中南林业科技大学学报, 2023, 43(7): 1-22. |
| CHEN Y Z. Scientific and technological progress and future core technologies of oil tea camellia in China[J]. Journal of Central South University of Forestry & Technology, 2023, 43(7): 1-22. | |
| [9] | 马鹏伟, 周杰. 基于改进YOLOv7的复杂环境下的葡萄成熟度检测[J]. 农业工程学报, 2025, 41(3): 171-178. |
| MA P W, ZHOU J. Detecting grape ripeness in complex environments using improved YOLOv7[J]. Transactions of the Chinese Society of Agricultural Engineering, 2025, 41(3): 171-178. | |
| [10] | HOMAYOUNI T, GHOLAMI A, TOUDESHKI A, et al. Estimation of proper shaking parameters for pistachio trees based on their trunk size[J]. Biosystems Engineering, 2022, 216: 121-131. |
| [11] | 石兴昌, 吴钟琦. 油茶种植前景分析及营林技术要点[J]. 现代农村科技, 2025(3): 60-61. |
| SHI X C, WU Z Q. Analysis on the planting prospect of Camellia oleifera and key points of management[J]. Modern Rural Science and Technology, 2025(3): 60-61. | |
| [12] | 闫锋欣, 李许杰, 杨永霞, 等. 手持冲击梳刷式油茶果采摘装置设计与试验[J]. 农业机械学报, 2023, 54(12): 129-140. |
| YAN F X, LI X J, YANG Y X, et al. Design and experiment of hand-held impacting comb-type Camellia oleifera fruit harvester[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(12): 129-140. | |
| [13] | 李善军, 陈辉龙, 彭际博, 等. 丘陵山地果园全液压遥控式履带动力底盘设计与试验[J]. 农业机械学报, 2024, 55(2): 119-127. |
| LI S J, CHEN H L, PENG J B, et al. Design and test of hydraulic remote control crawler power chassis for hilly and mountainous orchards[J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(2): 119-127. | |
| [14] | 吴佳朋, 唐琦军, 张大庆, 等. 我国丘陵山区油茶机械化种植研究[J]. 南方农机, 2025, 56(1): 1-6. |
| WU J P, TANG Q J, ZHANG D Q, et al. Research on mechanized planting of Camellia oleifera in hilly and mountainous areas of China[J]. China Southern Agricultural Machinery, 2025, 56(1): 1-6. | |
| [15] | 高自成, 李立君, 刘浩. 油茶果采摘机物料收集装置的选型研究与设计[J]. 中南林业科技大学学报, 2011, 31(10): 168-170. |
| GAO Z C, LI L J, LIU H. Choice and design of materials collection device for picking machine of oil tea fruits[J]. Journal of Central South University of Forestry & Technology, 2011, 31(10): 168-170. | |
| [16] | 饶洪辉, 罗时挺, 余佳佳, 等. 基于ANSYS Workbench的齿梳拨刀式油茶果采摘机拨果及花苞损伤仿真研究[J]. 浙江农业学报, 2017, 29(12): 2134-2141. |
| RAO H H, LUO S T, YU J J, et al. Study on simulation analysis of camellia fruit picking and its bud damage with tooth comb dial knife machine based on ANSYS Workbench[J]. Acta Agriculturae Zhejiangensis, 2017, 29(12): 2134-2141. | |
| [17] | 伍德林, 李超, 曹成茂, 等. 摇枝式油茶果采摘装置作业过程分析与试验[J]. 农业工程学报, 2020, 36(10): 56-62. |
| WU D L, LI C, CAO C M, et al. Analysis and experiment of the operation process of branch-shaking type Camellia oleifera fruit picking device[J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(10): 56-62. | |
| [18] | 刘怀粤, 高自成, 李立君, 等. 三点接触式油茶果树夹持机构的研制与试验[J]. 农机化研究, 2025, 47(9): 43-50. |
| LIU H Y, GAO Z C, LI L J, et al. Development and test of three-point contact Camellia oleifera fruit tree clamping mechanism[J]. Journal of Agricultural Mechanization Research, 2025, 47(9): 43-50. | |
| [19] | 李庆松, 周华茂, 饶洪辉, 等. 便携式油茶果分层采摘装置设计与试验[J]. 农机化研究, 2024, 46(1): 191-195. |
| LI Q S, ZHOU H M, RAO H H, et al. Design and experiment of portable layered picking device for Camellia oleifera fruit[J]. Journal of Agricultural Mechanization Research, 2024, 46(1): 191-195. | |
| [20] | 陈开展, 胡安国, 钱寅, 等. 油茶果和花苞脱离力试验研究[J]. 中国农机化学报, 2019, 40(12): 87-92. |
| CHEN K Z, HU A G, QIAN Y, et al. Experimental study on the detachment force of oil-tea camellia fruit and bud[J]. Journal of Chinese Agricultural Mechanization, 2019, 40(12): 87-92. | |
| [21] | 张逸晨, 赵佳欣, 韩昊奇, 等. 可悬停扑翼飞行器研究现状与关键技术[J]. 无人系统技术, 2023, 6(3): 1-18. |
| ZHANG Y C, ZHAO J X, HAN H Q, et al. Current status and key techniques of hovering flapping-wing air vehicles[J]. Unmanned Systems Technology, 2023, 6(3): 1-18. |
| [1] | 韦娇君, 王灿琴, 阎勇, 韦仕岩, 罗阳兰, 王晓国, 周茂荣. 紫芝孢子收集条件及其萌发技术优化[J]. 浙江农业学报, 2025, 37(8): 1634-1647. |
| [2] | 刘丽敏, 任萍, 陈建能, 张雪恒. 基于作物力学特性的甘蔗收割机参数优化与田间试验[J]. 浙江农业学报, 2023, 35(5): 1187-1194. |
| [3] | 宋朱军, 吴雪梅, 李国昌, 王芳, 刘红芸, 张富贵, 张培坤. 底肥定点深施机地轮组件优化[J]. 浙江农业学报, 2019, 31(5): 829-836. |
| [4] | 王克磊, 周友和, 史建磊, 黄宗安, 朱隆静, 徐坚. 潮汐灌溉动态水位管理在黄瓜育苗上的应用[J]. 浙江农业学报, 2017, 29(3): 408-413. |
| [5] | 饶洪辉, 罗时挺, 余佳佳, 张立勇, 刘木华. 基于ANSYS Workbench的齿梳拨刀式油茶果采摘机拨果及花苞损伤仿真研究[J]. 浙江农业学报, 2017, 29(12): 2134-2141. |
| [6] | 刘光宪, 祝水兰, 周巾英, 朱雪晶, 冯健雄. 风味蛋白酶水解鸭骨工艺优化[J]. 浙江农业学报, 2017, 29(12): 2128-2133. |
| [7] | 杨申明1,王波1,王振吉1,2,*,刘强1. 金雀花总黄酮提取工艺优化及抗氧化性研究[J]. 浙江农业学报, 2015, 27(2): 278-. |
| [8] | 王晓明;孙玉辉;张欢;刘齐;董晓莹;曹焱鑫;邵丽杰;张大雷;寇巍*. 绿色木霉固态发酵生产纤维素酶条件优化与酶的固定化[J]. , 2014, 26(1): 0-193. |
| [9] | 姚晶;任婧;吴正钧;郭本恒;* . 胆盐水解酶基因bsh工程菌表达条件的优化[J]. , 2011, 23(6): 0-1226. |
| [10] | 许尧兴;李艳丽;许少春;柳永 . 米曲霉ZW-06在固态基质上产高活性中性蛋白酶发酵条件研究[J]. , 2008, 20(6): 0-456. |
| [11] | 秦艳;李卫芬;雷剑;余东游. 凝结芽孢杆菌发酵条件的优化[J]. , 2008, 20(6): 0-474. |
| [12] | 周利亘;陈新峰;王君虹;王春辉;陈坚;袁亚;谢磊. 乳源酪蛋白肽脱色工艺条件的研究[J]. , 2007, 19(2): 0-78. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
