Acta Agriculturae Zhejiangensis ›› 2026, Vol. 38 ›› Issue (3): 588-599.DOI: 10.3969/j.issn.1004-1524.20250029
• Biosystems Engineering • Previous Articles Next Articles
An improved instance segmentation algorithm for apple picking robots based on SOLOv2
ZHANG Guo1( ), ZHOU Qinghui2,*(), HE Shengxi3
), ZHOU Qinghui2,*(), HE Shengxi3
- 1.
College of Intelligent Manufacturing and Robotics ,Chongqing College of Science and Creation Chongqing 402160, China
2.State Key Laboratory of Mechanical Transmission ,Chongqing University Chongqing 400044, China
3.Chongqing Chang’an Automobile Co. ,Ltd. Chongqing 400023, China
-
Received:2025-01-06Online:2026-03-25Published:2026-04-17 -
Contact:ZHOU Qinghui
CLC Number:
Cite this article
ZHANG Guo, ZHOU Qinghui, HE Shengxi. An improved instance segmentation algorithm for apple picking robots based on SOLOv2[J]. Acta Agriculturae Zhejiangensis, 2026, 38(3): 588-599.
share this article
Add to citation manager EndNote|Ris|BibTeX
URL: http://www.zjnyxb.cn/EN/10.3969/j.issn.1004-1524.20250029
Fig.1 Examples of dataset
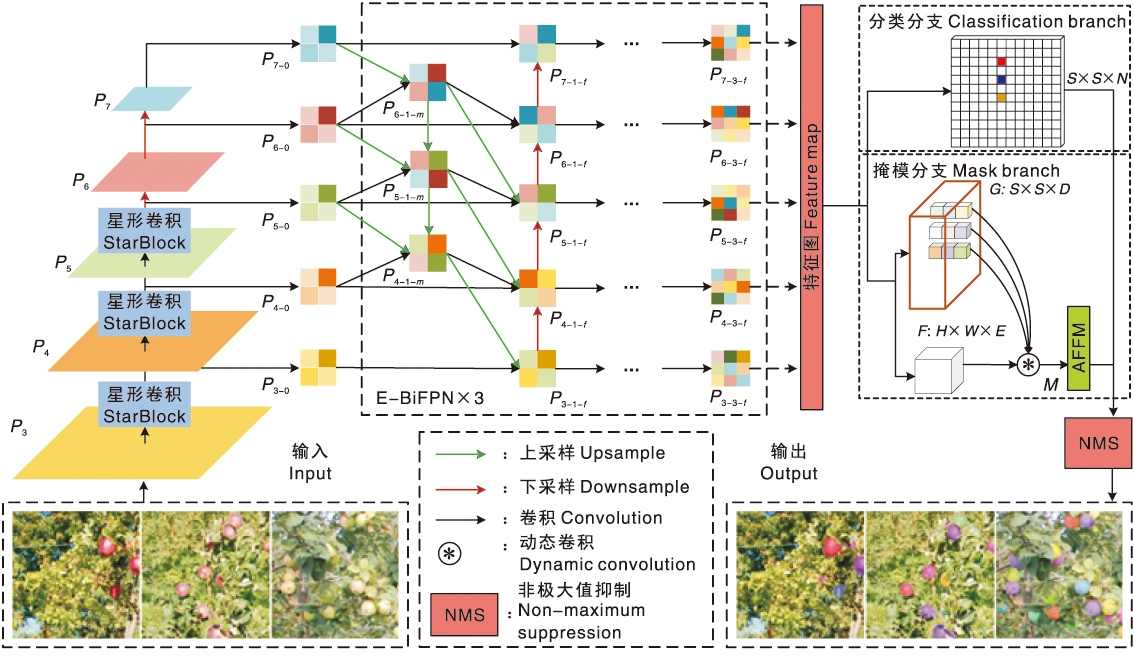
Fig.2 AE-SOLOv2 network structure AFFM, Attention feature fusion module.
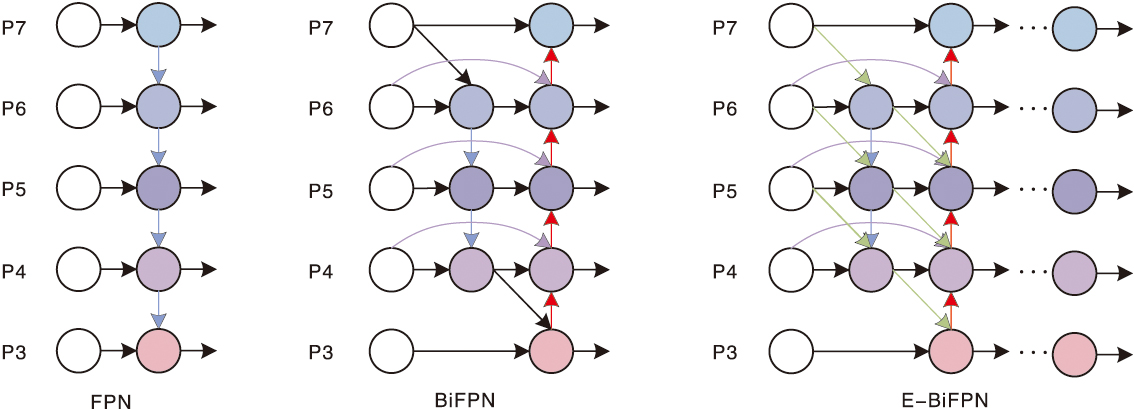
Fig.3 Structure of different neck networks
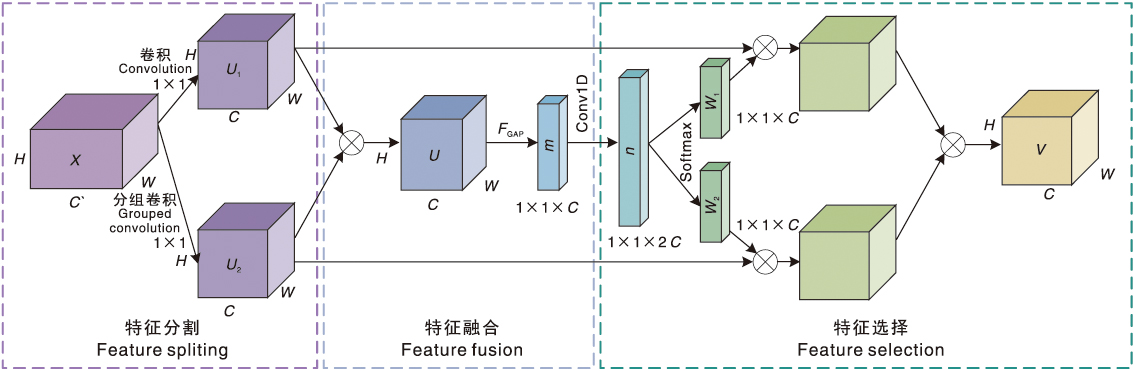
Fig.4 Adaptive feature fusion module network structure
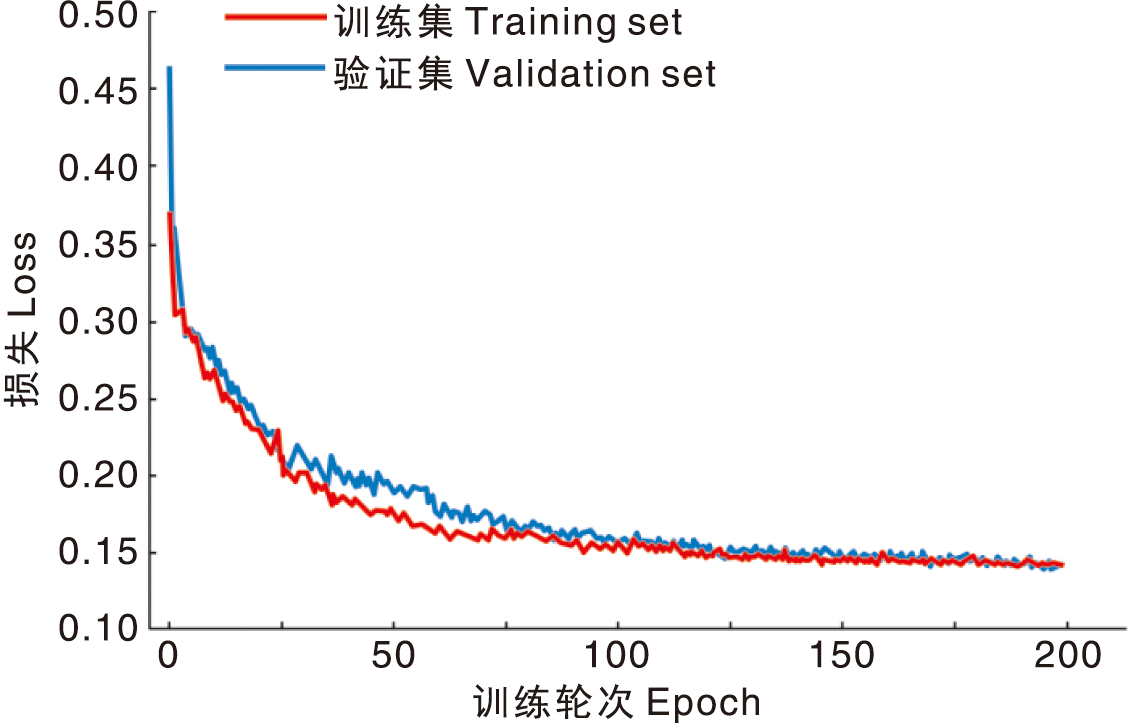
Fig.5 Loss curves of the model on the training set and validation set
| 改进点 Improvements | mAP50/% | Params/106 | FLOPs/109 | t/ms |
|---|---|---|---|---|
| — | 87.3 | 46.6 | 179.5 | 24.7 |
| StarBlock | 87.4 | 21.6 | 81.9 | 11.9 |
| StarBlock+E-BiFPN | 89.0 | 21.7 | 82.4 | 11.9 |
| StarBlock+ | 91.2 | 22.2 | 83.2 | 12.3 |
| E-BiFPN+AFFM |
Table 1 Results of ablation experiment
| 改进点 Improvements | mAP50/% | Params/106 | FLOPs/109 | t/ms |
|---|---|---|---|---|
| — | 87.3 | 46.6 | 179.5 | 24.7 |
| StarBlock | 87.4 | 21.6 | 81.9 | 11.9 |
| StarBlock+E-BiFPN | 89.0 | 21.7 | 82.4 | 11.9 |
| StarBlock+ | 91.2 | 22.2 | 83.2 | 12.3 |
| E-BiFPN+AFFM |
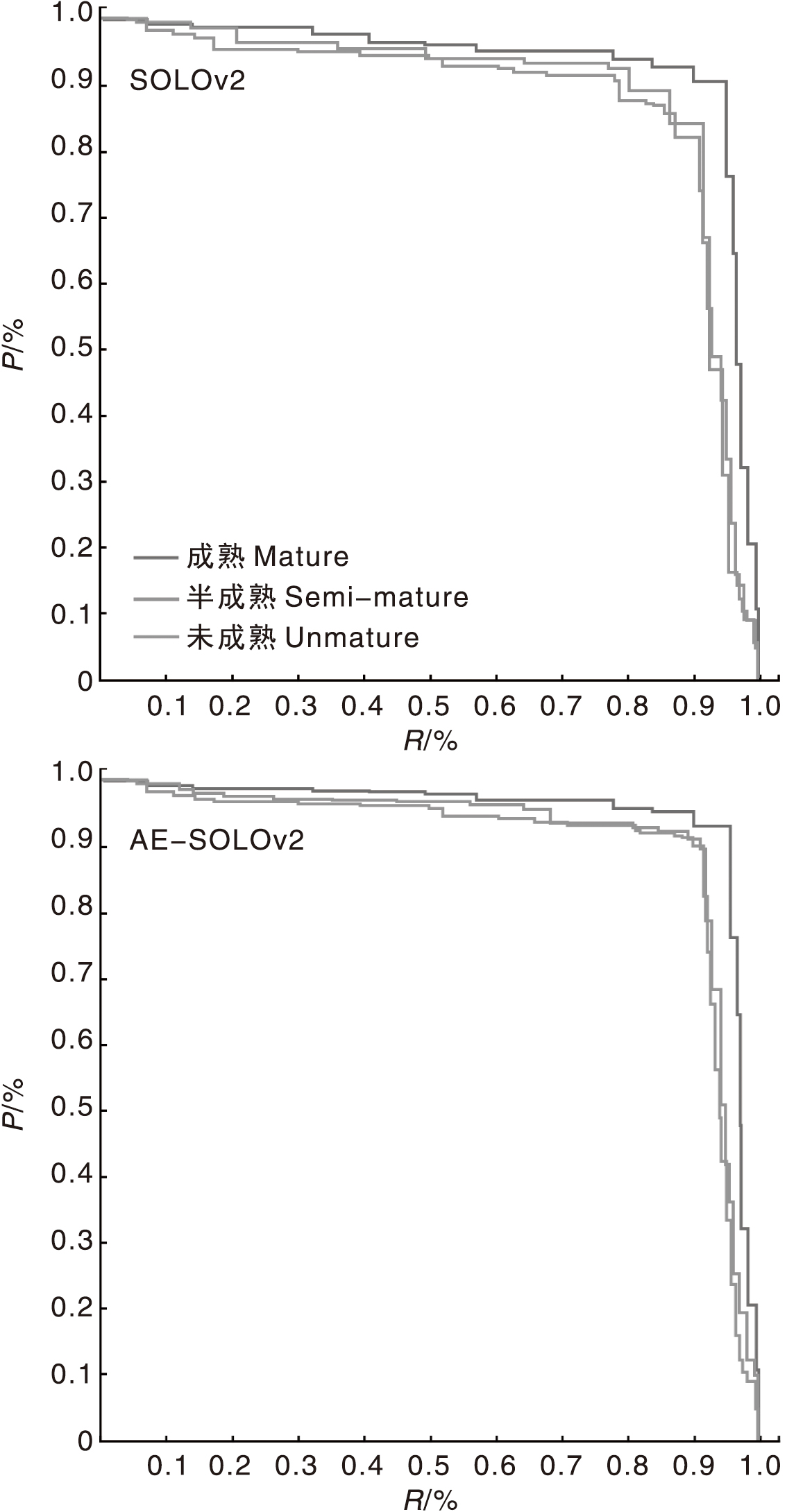
Fig.6 P(precision)-R(recall) curve of SOLOv2 and AE-SOLOv2 models
| 模型Model | mAPS/% | mAPM/% | mAPL/% | mAP50:95/% | mAP50/% | mAP75/% | Params/106 | FLOPs/109 | t/ms |
|---|---|---|---|---|---|---|---|---|---|
| Hybrid Task Cascade | 39.0 | 57.8 | 80.5 | 42.5 | 88.6 | 58.4 | 87.6 | 298.0 | 59.8 |
| Mask RCNN | 38.4 | 57.9 | 79.5 | 42.0 | 87.5 | 57.8 | 63.4 | 235.0 | 48.5 |
| Cascade Mask RCNN | 38.5 | 57.7 | 80.1 | 42.2 | 88.0 | 58.1 | 77.3 | 275.0 | 52.9 |
| YOLACT | 38.2 | 57.0 | 79.5 | 41.6 | 86.7 | 57.2 | 35.3 | 68.4 | 26.0 |
| RTMDet | 37.0 | 56.3 | 78.0 | 40.4 | 84.1 | 55.5 | 10.2 | 21.6 | 10.6 |
| SOLOv2 | 38.3 | 57.9 | 79.4 | 41.9 | 87.3 | 57.6 | 46.6 | 179.5 | 24.7 |
| AE-SOLOv2 | 39.9 | 59.0 | 81.5 | 43.8 | 91.2 | 60.2 | 22.2 | 83.2 | 12.3 |
Table 2 Comparative experimental results
| 模型Model | mAPS/% | mAPM/% | mAPL/% | mAP50:95/% | mAP50/% | mAP75/% | Params/106 | FLOPs/109 | t/ms |
|---|---|---|---|---|---|---|---|---|---|
| Hybrid Task Cascade | 39.0 | 57.8 | 80.5 | 42.5 | 88.6 | 58.4 | 87.6 | 298.0 | 59.8 |
| Mask RCNN | 38.4 | 57.9 | 79.5 | 42.0 | 87.5 | 57.8 | 63.4 | 235.0 | 48.5 |
| Cascade Mask RCNN | 38.5 | 57.7 | 80.1 | 42.2 | 88.0 | 58.1 | 77.3 | 275.0 | 52.9 |
| YOLACT | 38.2 | 57.0 | 79.5 | 41.6 | 86.7 | 57.2 | 35.3 | 68.4 | 26.0 |
| RTMDet | 37.0 | 56.3 | 78.0 | 40.4 | 84.1 | 55.5 | 10.2 | 21.6 | 10.6 |
| SOLOv2 | 38.3 | 57.9 | 79.4 | 41.9 | 87.3 | 57.6 | 46.6 | 179.5 | 24.7 |
| AE-SOLOv2 | 39.9 | 59.0 | 81.5 | 43.8 | 91.2 | 60.2 | 22.2 | 83.2 | 12.3 |
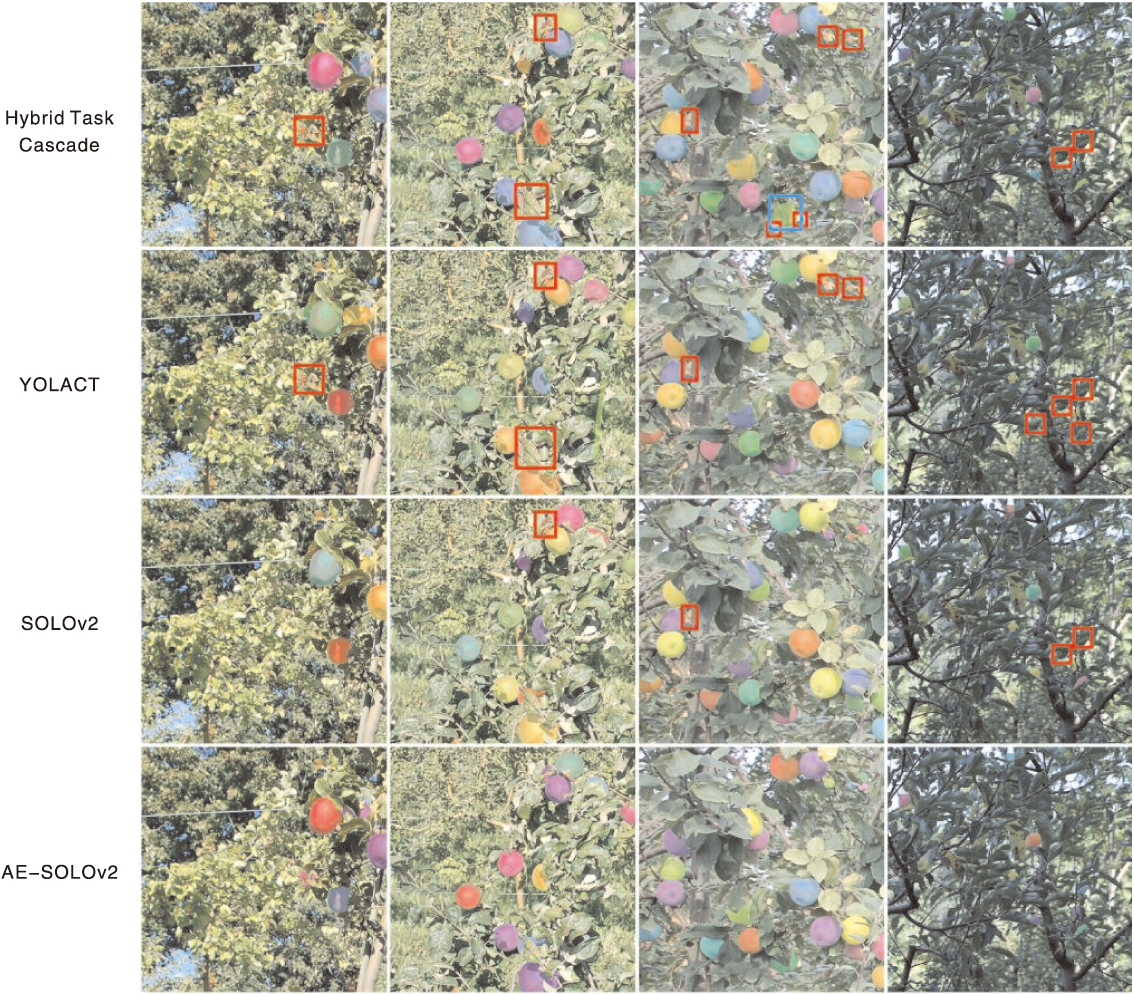
Fig.7 Visual contrast result
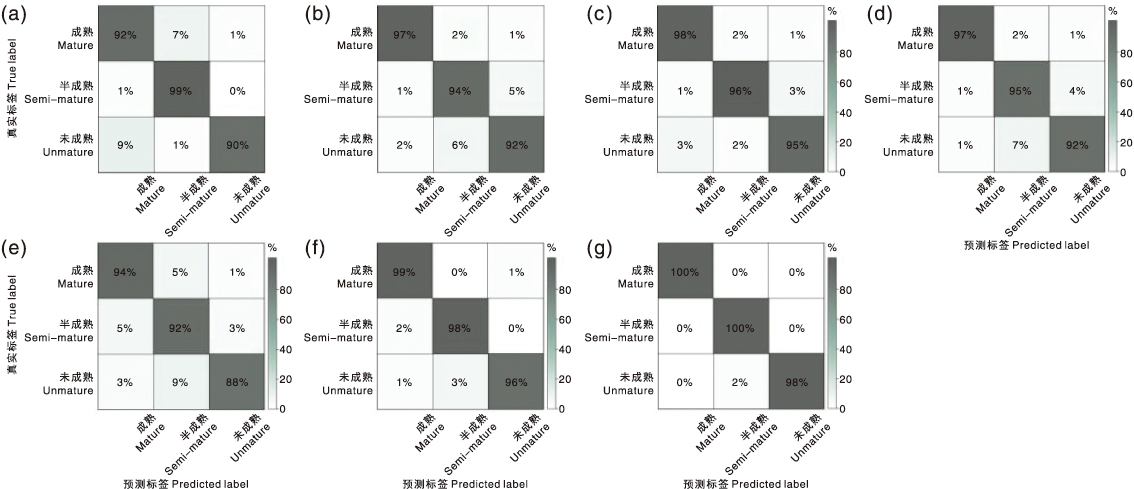
Fig.8 Comparison of prediction results of confusion matrix a,Hybrid Task Cascade;b,Mask RCNN;c,Cascade-Mask RCNN;d,YOLACT;e,RTMDet;f,SOLOv2;g,AE-SOLOv2。

Fig.9 Picking process of picking robot
| 模型 Model | 正确识别数 Correct identifications | 漏检数 Missed detections | 误检数 False detections | t/ms |
|---|---|---|---|---|
| SOLOv2 | 74 | 10 | 3 | 112.4 |
| AE-SOLOv2 | 80 | 6 | 1 | 58.5 |
Table 3 Comparison of perceptual performance of picking robot
| 模型 Model | 正确识别数 Correct identifications | 漏检数 Missed detections | 误检数 False detections | t/ms |
|---|---|---|---|---|
| SOLOv2 | 74 | 10 | 3 | 112.4 |
| AE-SOLOv2 | 80 | 6 | 1 | 58.5 |
| [1] | 冯青春, 赵春江, 李涛, 等. 苹果四臂采摘机器人系统设计与试验[J]. 农业工程学报, 2023, 39(13): 25-33. |
| FENG Q C, ZHAO C J, LI T, et al. Design and test of a four-arm apple harvesting robot[J]. Transactions of the Chinese Society of Agricultural Engineering, 2023, 39(13): 25-33. | |
| [2] | 苑进. 选择性收获机器人技术研究进展与分析[J]. 农业机械学报, 2020, 51(9): 1-17. |
| YUAN J. Research progress analysis of robotics selective harvesting technologies[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(9): 1-17. | |
| [3] | 赵亚楠, 邓寒冰, 刘婷, 等. 基于弱监督学习的玉米苗期植株图像实例分割方法[J]. 农业工程学报, 2022, 38(19): 143-152. |
| ZHAO Y N, DENG H B, LIU T, et al. Instance segmentation method of seedling maize plant images based on weak supervised learning[J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(19): 143-152. | |
| [4] | LIU X X, CHEN Y P, WEI M Q, et al. Building instance extraction method based on improved hybrid task cascade[J]. IEEE Geoscience and Remote Sensing Letters, 2021, 19: 3002005. |
| [5] | JIA W K, WEI J M, ZHANG Q, et al. Accurate segmentation of green fruit based on optimized mask RCNN application in complex orchard[J]. Frontiers in Plant Science, 2022, 13: 955256. |
| [6] | 高倩, 诸德宏, 封浩. 基于深度学习的番茄识别与实例分割[J]. 软件导刊, 2023, 22(2): 75-80. |
| GAO Q, ZHU D H, FENG H. Tomato recognition and instance segmentation based on deep learning[J]. Software Guide, 2023, 22(2): 75-80. | |
| [7] | JIA W K, TIAN Y Y, LUO R, et al. Detection and segmentation of overlapped fruits based on optimized mask R-CNN application in apple harvesting robot[J]. Computers and Electronics in Agriculture, 2020, 172: 105380. |
| [8] | ZENG J X, OUYANG H, LIU M, et al. Multi-scale YOLACT for instance segmentation[J]. Journal of King Saud University: Computer and Information Sciences, 2022, 34(10): 9419-9427. |
| [9] | RONG J C, HU L, ZHOU H, et al. A selective harvesting robot for cherry tomatoes: design, development, field evaluation analysis[J]. Journal of Field Robotics, 2024, 41(8): 2564-2582. |
| [10] | 倪纪鹏, 朱立成, 董力中, 等. 基于SwinS-YOLACT的番茄采摘机器人实时实例分割算法研究[J]. 农业机械学报, 2024, 55(10): 18-30. |
| NI J P, ZHU L C, DONG L Z, et al. Real-time instance segmentation algorithm for tomato picking robot based on SwinS-YOLACT[J]. Transactions of the Chinese Society for Agricultural Machinery, 2024, 55(10): 18-30. | |
| [11] | 朱德利, 余茂生, 梁明飞. 基于SwinT-YOLACT的玉米果穗实时实例分割[J]. 农业工程学报, 2023, 39(14): 164-172. |
| ZHU D L, YU M S, LIANG M F. Real-time instance segmentation of maize ears using SwinT-YOLACT[J]. Transactions of the Chinese Society of Agricultural Engineering, 2023, 39(14): 164-172. | |
| [12] | 许楠, 苑迎春, 耿俊, 等. 基于改进YOLOv8s的果实与叶片器官分割方法[J]. 农业工程学报, 2024, 40(15): 119-126. |
| XU N, YUAN Y C, GENG J, et al. Segmenting fruit and leaf organ using improved YOLOv8s[J]. Transactions of the Chinese Society of Agricultural Engineering, 2024, 40(15): 119-126. | |
| [13] | 张勤, 庞月生, 李彬. 基于实例分割的番茄串视觉定位与采摘姿态估算方法[J]. 农业机械学报, 2023, 54(10): 205-215. |
| ZHANG Q, PANG Y S, LI B. Visual positioning and picking pose estimation of tomato clusters based on instance segmentation[J]. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(10): 205-215. | |
| [14] | 刘祥, 田敏, 梁金艳. 基于RCH-UNet的新疆密植棉花图像快速分割及产量预测[J]. 农业工程学报, 2024, 40(7): 230-239. |
| LIU X, TIAN M, LIANG J Y. Prediction of cotton yield densely planted in Xinjiang of China using RCH-UNet model[J]. Transactions of the Chinese Society of Agricultural Engineering, 2024, 40(7): 230-239. | |
| [15] | TANG S X, XIA Z L, GU J N, et al. High-precision apple recognition and localization method based on RGB-D and improved SOLOv2 instance segmentation[J]. Frontiers in Sustainable Food Systems, 2024, 8: 1403872. |
| [16] | LU Y J, WEI W, LI P X, et al. A deep learning method for building façade parsing utilizing improved SOLOv2 instance segmentation[J]. Energy and Buildings, 2023, 295: 113275. |
| [17] | WANG X L, ZHANG R F, KONG T, et al. Solov2:dynamic and fast instance segmentation[EB/OL]. [2025-01-06]. https://proceedings.neurips.cc/paper/2020/file/cd3afef-9b8b89558cd56638c3631868a-Paper.pdf. |
| [18] | SHEN Q, ZHANG L, ZHANG Y X, et al. Distracted driving behavior detection algorithm based on lightweight StarDL-YOLO[J]. Electronics, 2024, 13(16): 3216. |
| [19] | 王洪波, 杨永政, 谢志成, 等. 基于Res-Inception的农作物病虫害识别技术[J]. 江苏农业科学, 2024, 52(20): 181-189. |
| WANG H B, YANG Y Z, XIE Z C, et al. Crop diseases and pests identification technology based on Res-Inception[J]. Jiangsu Agricultural Sciences, 2024, 52(20): 181-189. | |
| [20] | 张磊, 李熙尉, 燕倩如, 等. 基于改进YOLOv5s的综采工作面人员检测算法[J]. 中国安全科学学报, 2023, 33(7): 82-89. |
| ZHANG L, LI X W, YAN Q R, et al. Personnel detection algorithm in fully mechanized coal face based on improved YOLOv5s[J]. China Safety Science Journal, 2023, 33(7): 82-89. | |
| [21] | 林知心, 郑玉棒, 马天宇, 等. 基于轻量级全连接张量映射网络的高光谱图像分类方法[J]. 电子学报, 2024, 52(10): 3541-3551. |
| LIN Z X, ZHENG Y B, MA T Y, et al. Lightweight fully-connected tensorial mapping network for hyperspectral image classification[J]. Acta Electronica Sinica, 2024, 52(10): 3541-3551. | |
| [22] | DENG C F, WANG M M, LIU L, et al. Extended feature pyramid network for small object detection[J]. IEEE Transactions on Multimedia, 2021, 24: 1968-1979. |
| [23] | 文雪梅, 王兴建, 宗炜佳, 等. 基于改进YOLOv5s模型的流体包裹体检测算法及其应用[J]. 科学技术与工程, 2024, 24(33): 14122-14128. |
| WEN X M, WANG X J, ZONG W J, et al. Fluid inclusion detection algorithm based on improved YOLOv5s model and its application[J]. Science Technology and Engineering, 2024, 24(33): 14122-14128. | |
| [24] | HE W F, LI C Z, NIE X F, et al. Recognition and detection of aero-engine blade damage based on Improved Cascade Mask R-CNN[J]. Applied Optics, 2021, 60(17): 5124-5133. |
| [25] | LIU S, ZOU H X, HUANG Y Z, et al. ERF-RTMDet: an improved small object detection method in remote sensing images[J]. Remote Sensing, 2023, 15(23): 5575. |
| [1] | TANG Zhiyong, HE Yichuan, TANG Zhihui, ZHANG Chao, LIU Zhan, LIU Xiaoyu. Research status and development trend of orchard picking machinery [J]. Acta Agriculturae Zhejiangensis, 2026, 38(1): 184-196. |
| [2] | ZHENG Hang, FENG Haodong, XUE Xianglei, YE Yunxiang, YU Jianlin, YU Guohong. Study on navigation line extraction algorithm for leaf vegetable ridges based on instance segmentations [J]. Acta Agriculturae Zhejiangensis, 2025, 37(3): 701-711. |
| [3] | ZHU Mingmin, ZHANG Guoping, TAN Jianjun, SUN Lingjiao, ZHU Li, JIAO Jie. A lightweight tea buds terminal detection model based on YOLOv5s [J]. Acta Agriculturae Zhejiangensis, 2024, 36(6): 1413-1424. |
| [4] | LI Dahua, KONG Shu, LI Dong, YU Xiao. Lightweight detection model of citrus leaf disease based on improved SSD [J]. Acta Agriculturae Zhejiangensis, 2024, 36(3): 662-670. |
| [5] | LI Qi, LI Yuzhe. Detection of piggery cleaning target under low-light condition [J]. Acta Agriculturae Zhejiangensis, 2023, 35(9): 2240-2249. |
| [6] | LI Rongpeng, MAMAT Sawut, SHENG Yanfang, HE Xugang. Identification and application of walnut disease based on CA-MobileNet-V2 [J]. Acta Agriculturae Zhejiangensis, 2023, 35(12): 2977-2987. |
| [7] | WANG Yingyun, LONG Yan, YANG Zhiyou, HUANG Lyuwen. Semantic segmentation method of apple leaf disease based on improved U-Net network [J]. Acta Agriculturae Zhejiangensis, 2023, 35(11): 2731-2741. |
| [8] | ZHOU Pinzhi, PEI Yuekun, WEI Ran, ZHANG Yongfei, GU Yu. Real-time detection of orchard cherry based on YOLOV4 model [J]. Acta Agriculturae Zhejiangensis, 2022, 34(11): 2522-2532. |
| [9] | ZHANG Ning, WU Huarui, HAN Xiao, MIAO Yisheng. Tomato disease recognition scheme based on multi-scale and attention mechanism [J]. Acta Agriculturae Zhejiangensis, 2021, 33(7): 1329-1338. |
| [10] | JU Hong-ling;JI Chang-ying*. Design of an end-effector for a multi\|use picking robot [J]. , 2010, 22(3): 0-373. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
