Acta Agriculturae Zhejiangensis ›› 2025, Vol. 37 ›› Issue (11): 2364-2375.DOI: 10.3969/j.issn.1004-1524.20240875
• Biosystems Engineering • Previous Articles Next Articles
Design and experiment of strawberry picking and grading robot based on YOLOv5-7.0
QIU Yan1,2( ), YE Ziran2, TAN Xiangfeng2, DAI Mengdi2, GE Shihao3, RUAN Yunjie3, ZHAO Xianliang1,*(), KONG Dedong2,*()
), YE Ziran2, TAN Xiangfeng2, DAI Mengdi2, GE Shihao3, RUAN Yunjie3, ZHAO Xianliang1,*(), KONG Dedong2,*()
- 1. School of Biological & Chemistry Engineering, Zhejiang University of Science and Technology, Hangzhou 310023, China
2. Institute of Digital Agriculture, Zhejiang Academy of Agricultural Sciences, Hangzhou 310021, China
3. College of Biosystems Engineering and Food Science, Zhejiang University, Hangzhou 310058, China
-
Received:2024-10-12Online:2025-11-25Published:2025-12-08
CLC Number:
Cite this article
QIU Yan, YE Ziran, TAN Xiangfeng, DAI Mengdi, GE Shihao, RUAN Yunjie, ZHAO Xianliang, KONG Dedong. Design and experiment of strawberry picking and grading robot based on YOLOv5-7.0[J]. Acta Agriculturae Zhejiangensis, 2025, 37(11): 2364-2375.
share this article
Add to citation manager EndNote|Ris|BibTeX
URL: http://www.zjnyxb.cn/EN/10.3969/j.issn.1004-1524.20240875
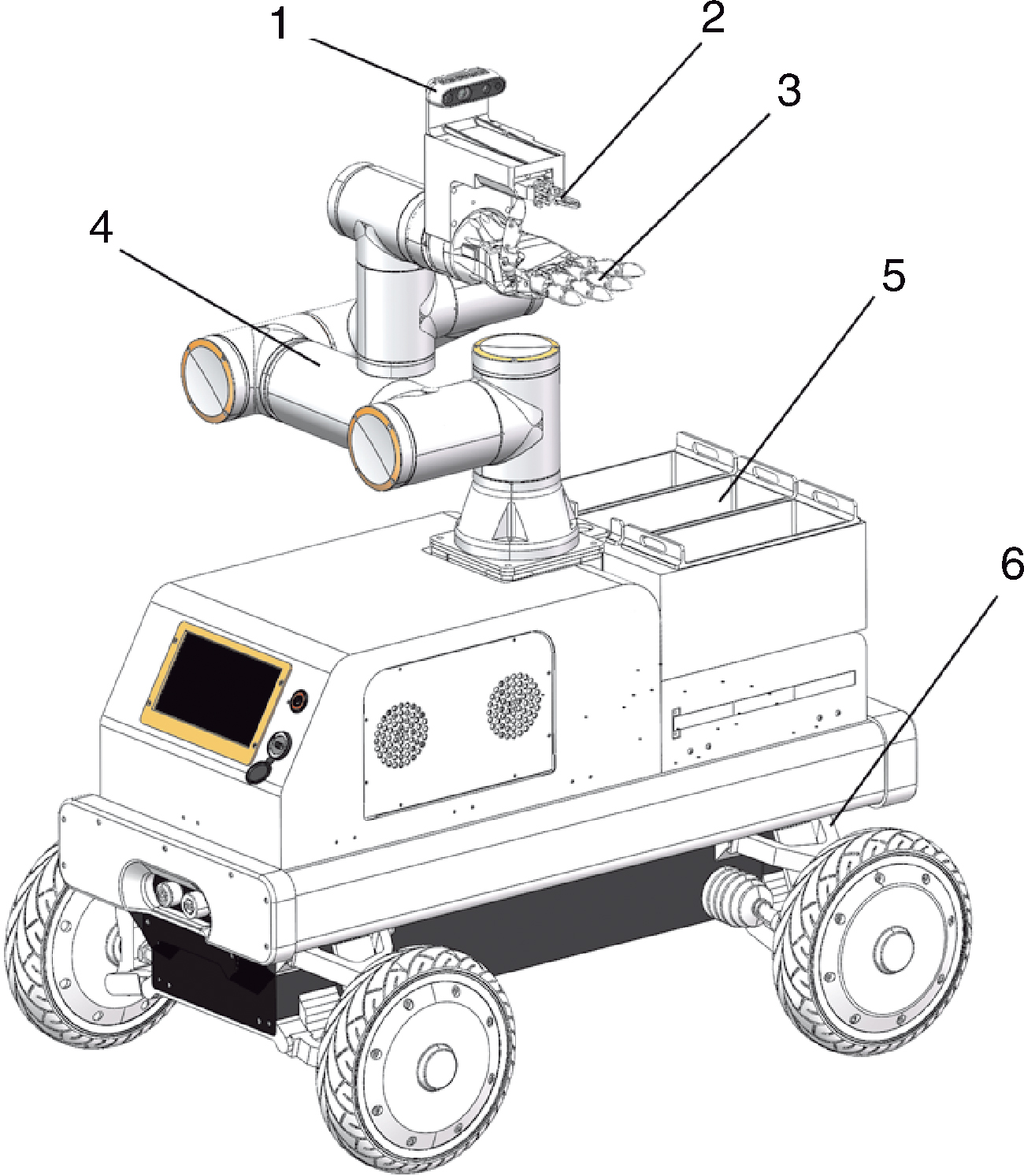
Fig.1 The structure of strawberry picking and grading robot 1, Depth camera RGB-D435; 2, Telescopic motorized scissors; 3, Humanoid underactuated manipulator; 4, 6-DOF robot arm; 5, Collection device; 6, Ackermann-type chassis.
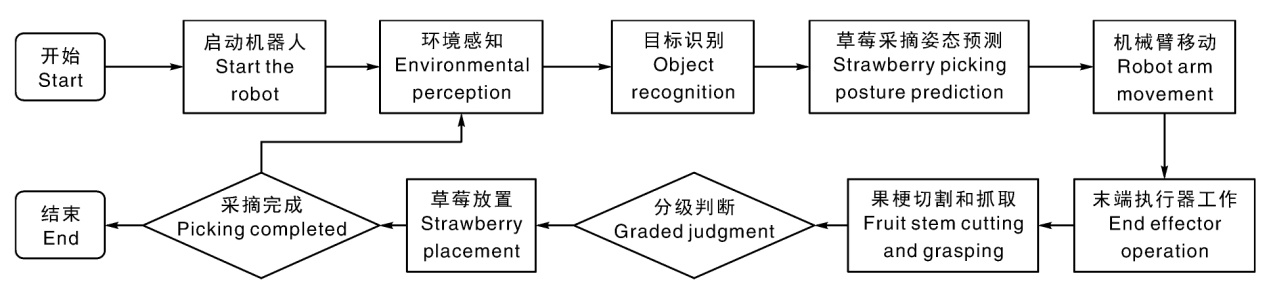
Fig.2 Robot workflow
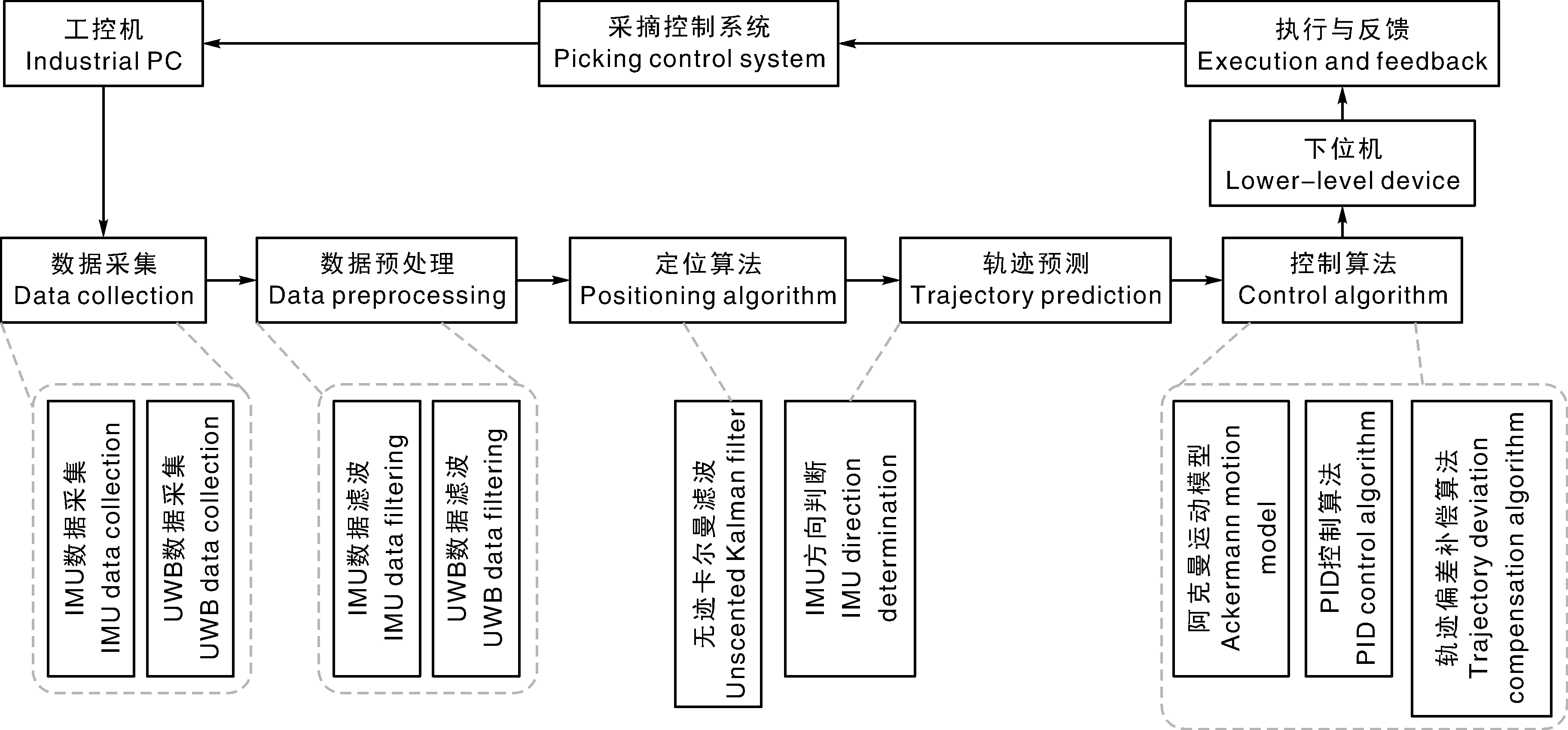
Fig.3 Structure of mobile control system
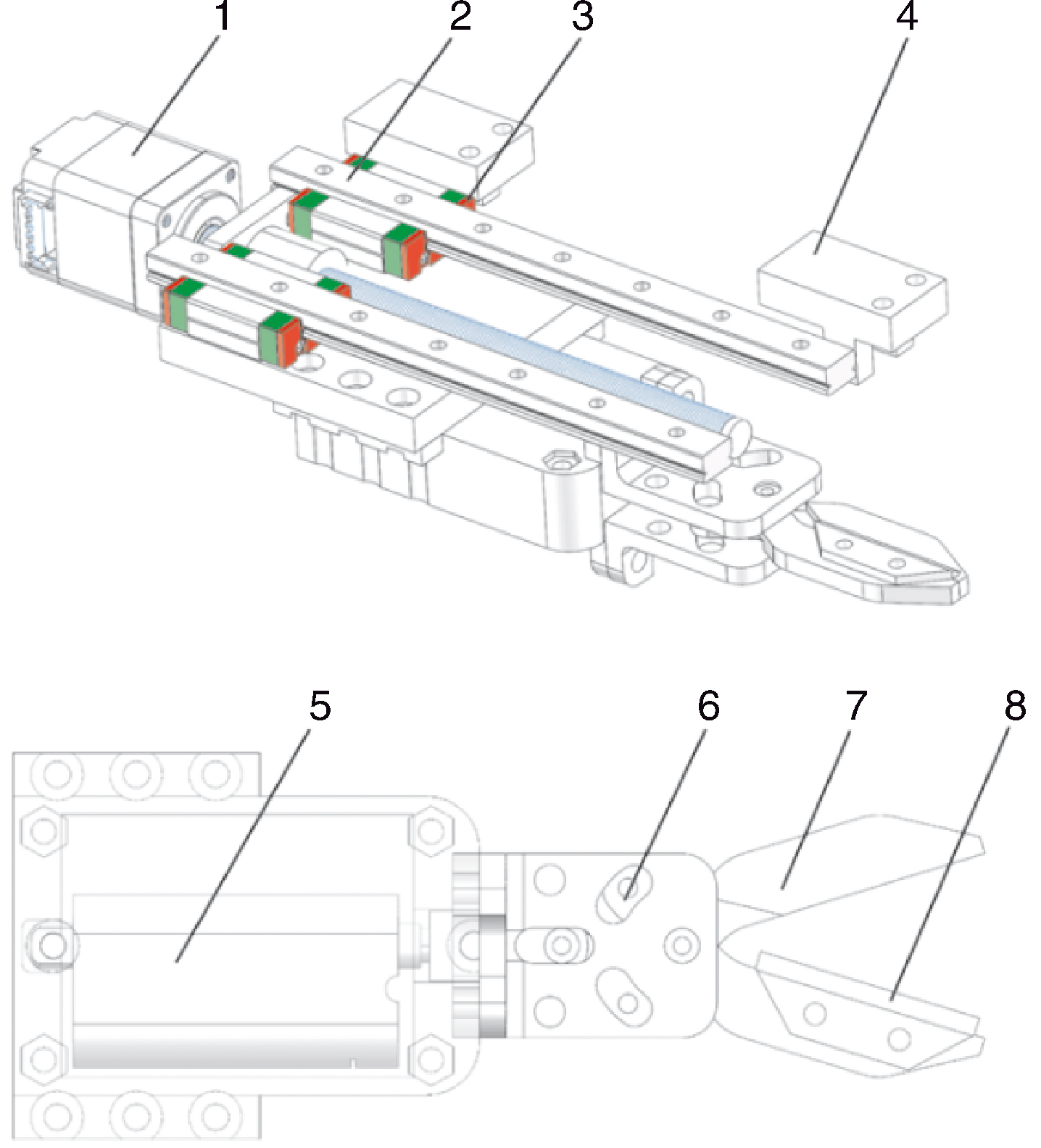
Fig.4 The structure of retractable electric scissors 1, Stepping motor; 2, Slide rail; 3, Slider; 4, Photoelectric sensor; 5, Pusher motor; 6, Linkage; 7, Cutter; 8, Blade.
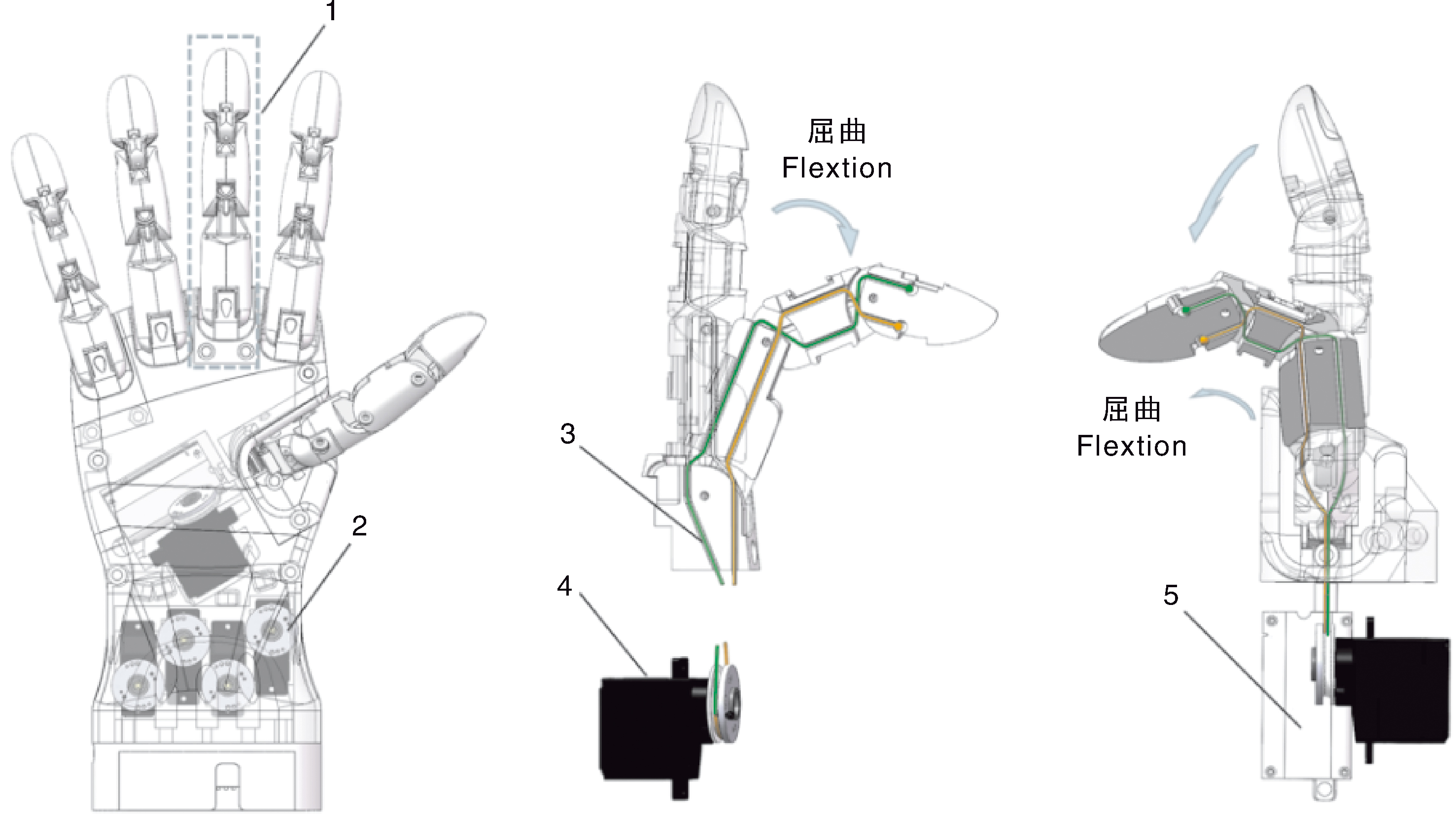
Fig.5 The structure of humanoid underactuated manipulator 1, Finger; 2, Turntable; 3, Rope; 4, Servo; 5, Pusher motor.
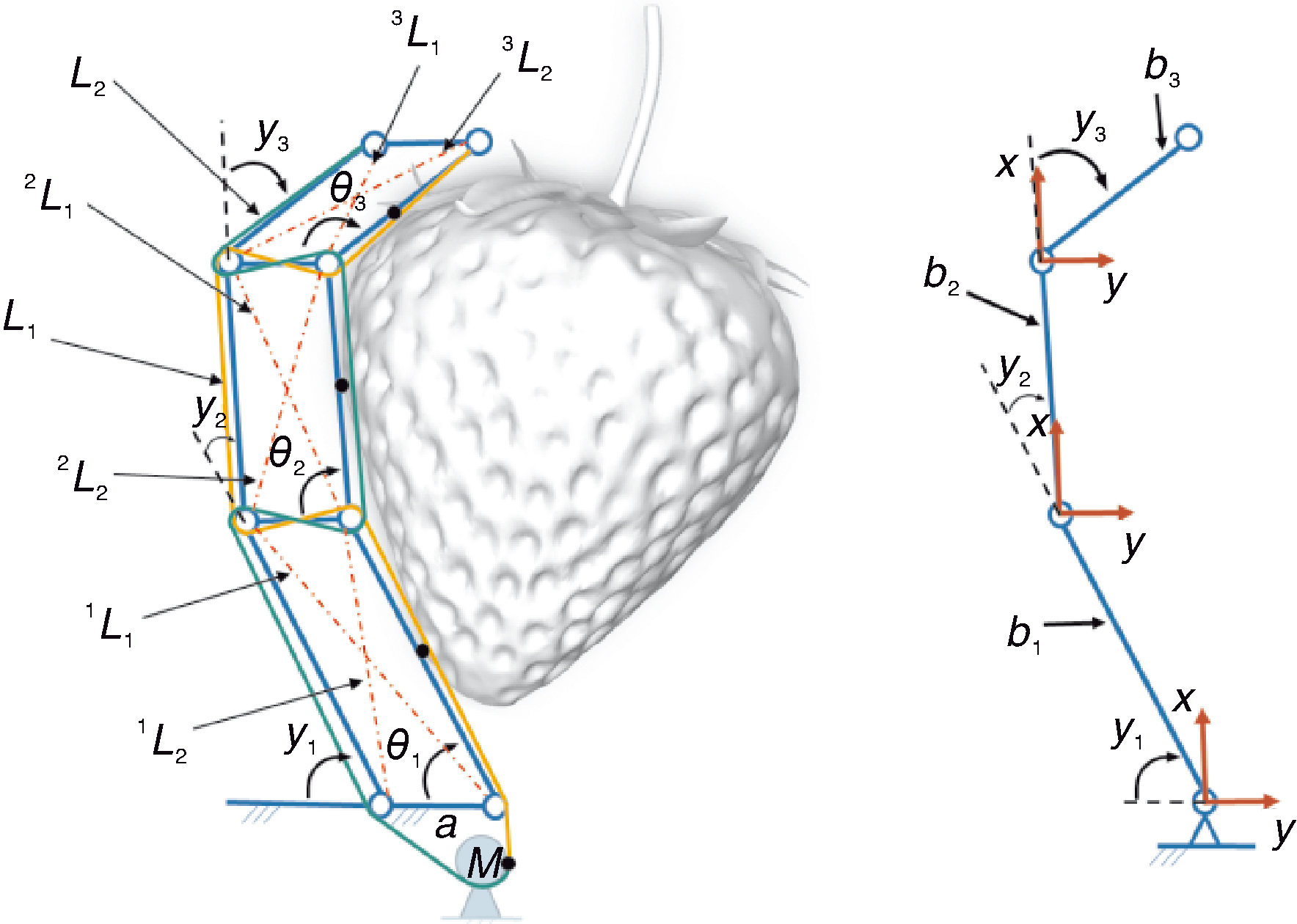
Fig.6 Theoretical mechanical model of finger
| i | ai-1/rad | bi-1/mm | di/mm | yi/rad |
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | y1 |
| 2 | 0 | 36 | 0 | y2 |
| 3 | 0 | 25 | 0 | y3 |
Table 1 Finger DH parameters
| i | ai-1/rad | bi-1/mm | di/mm | yi/rad |
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | y1 |
| 2 | 0 | 36 | 0 | y2 |
| 3 | 0 | 25 | 0 | y3 |
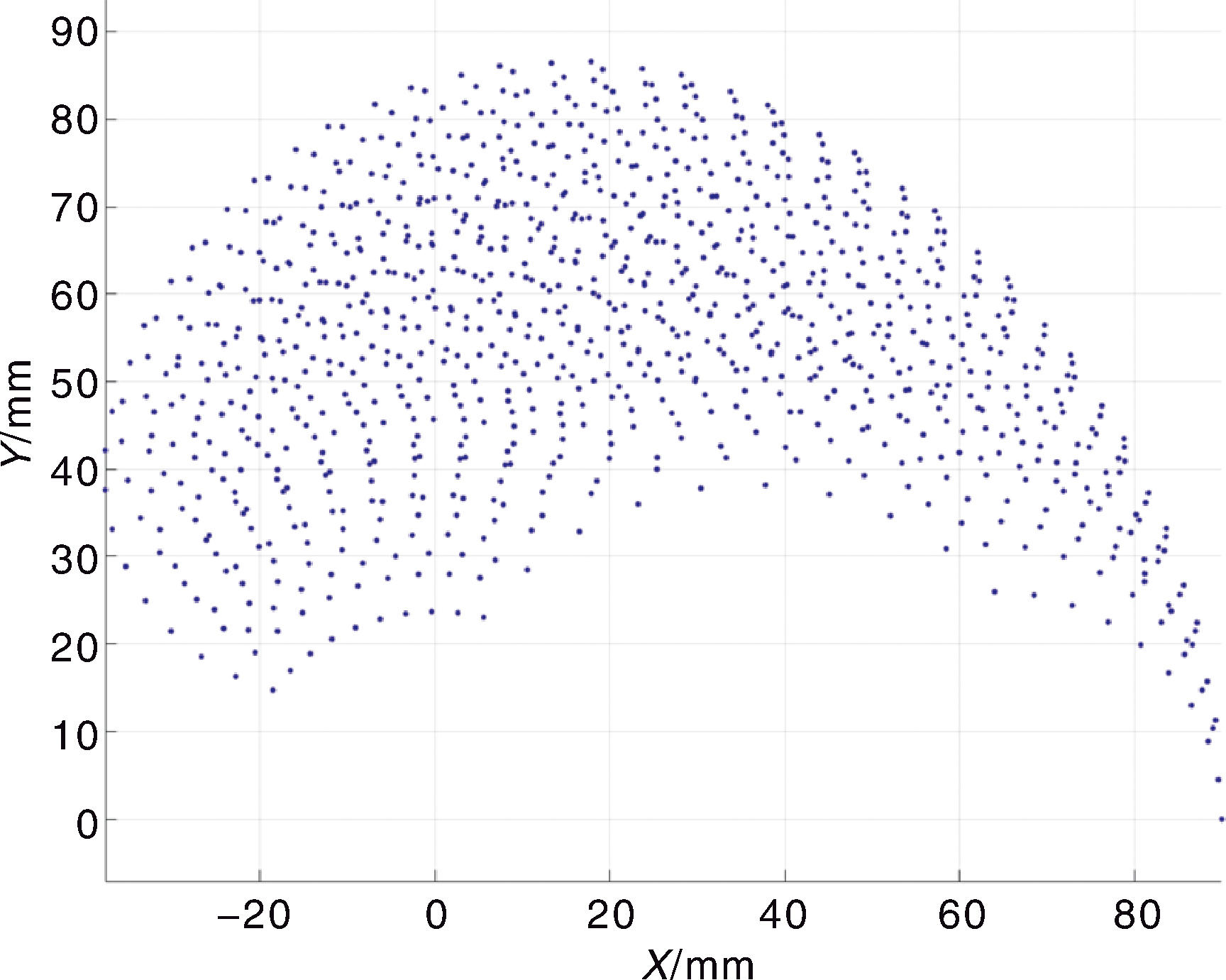
Fig.7 Range of motion of finger
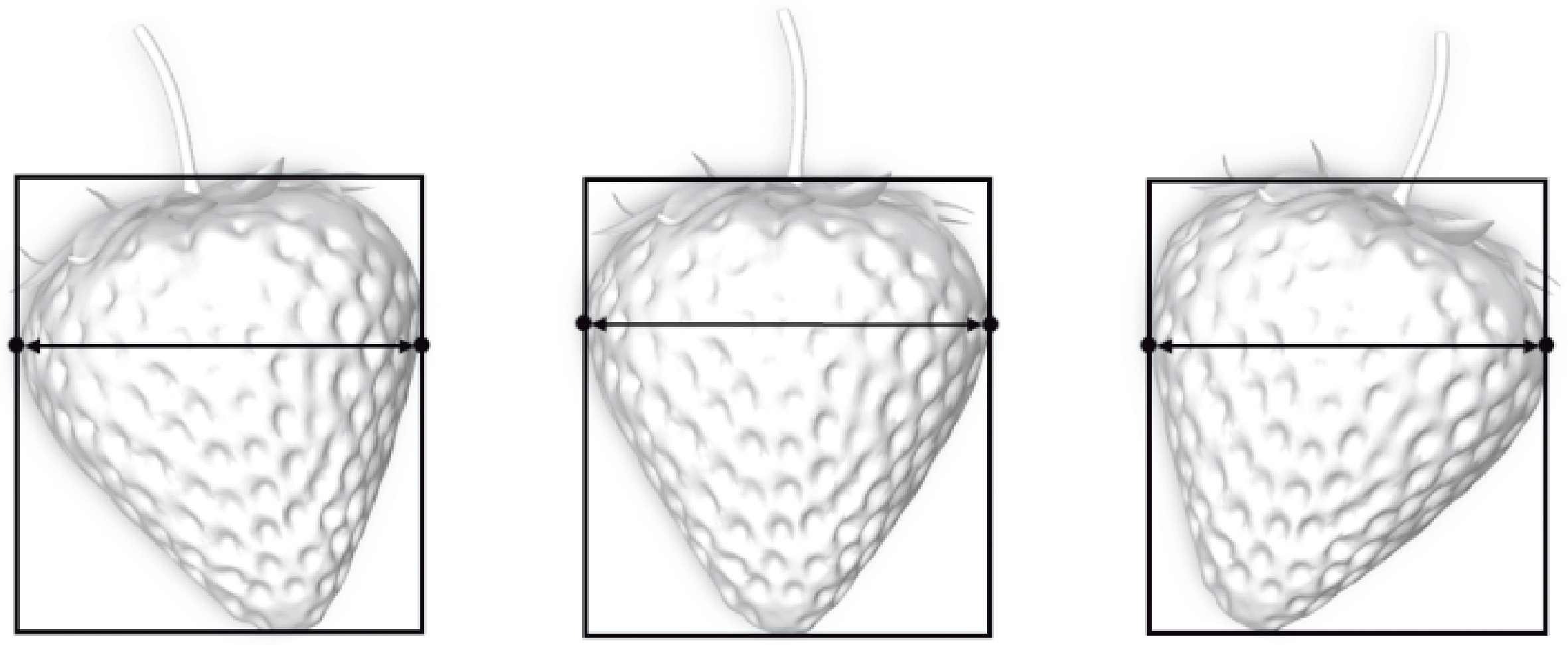
Fig.8 The posture of strawberry
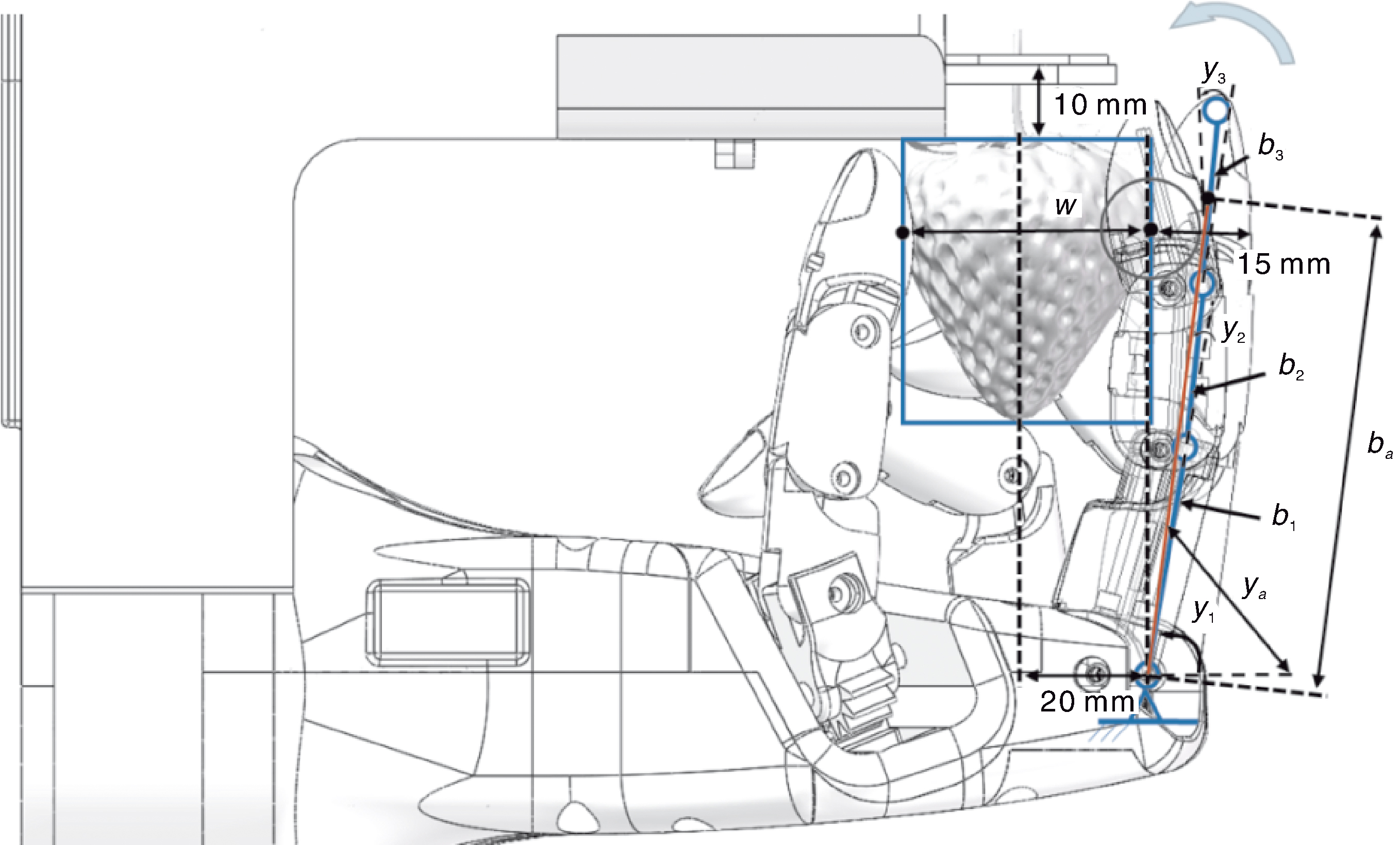
Fig.9 Theoretical grasping point analysis
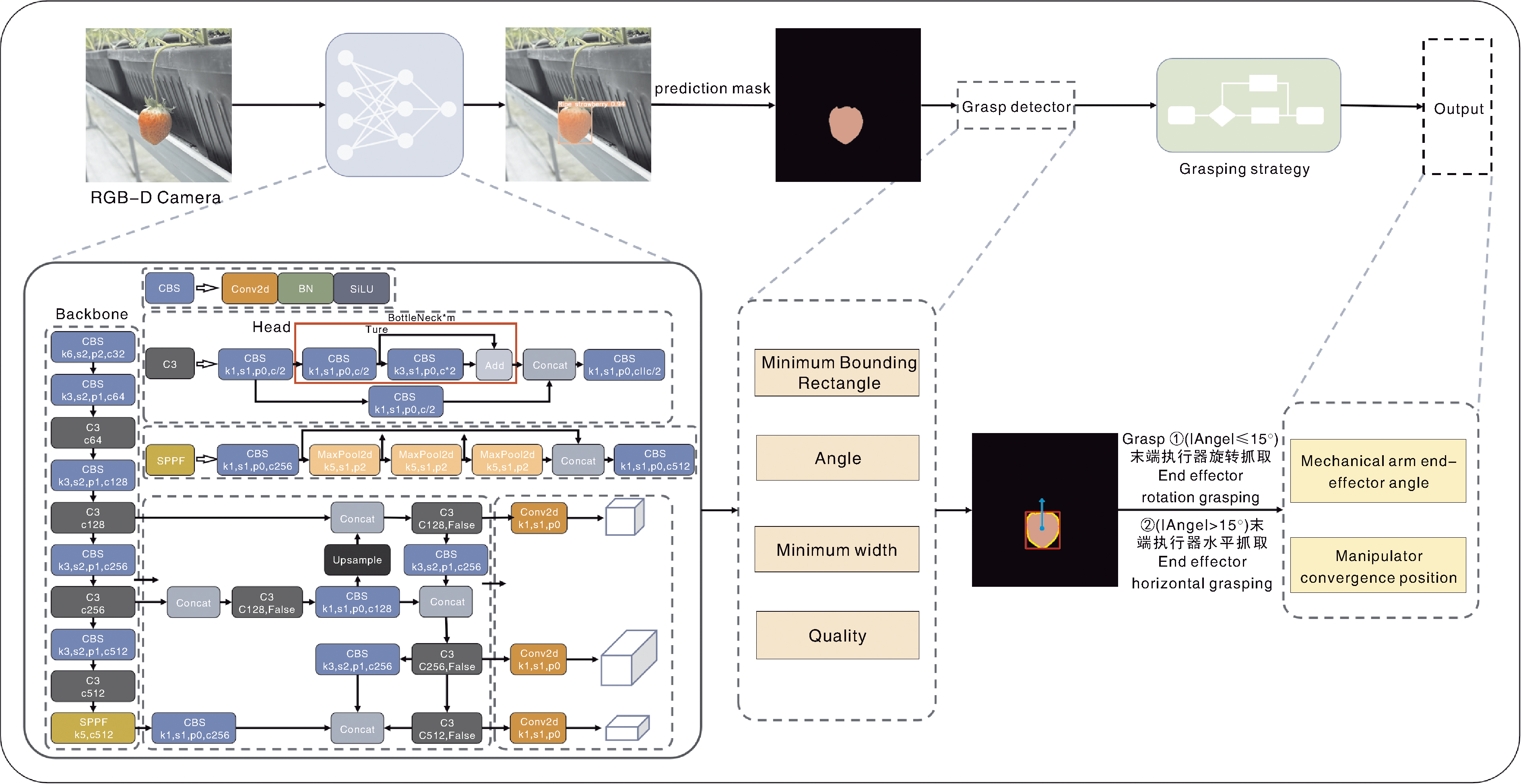
Fig.10 The structural model of grasping algorithm
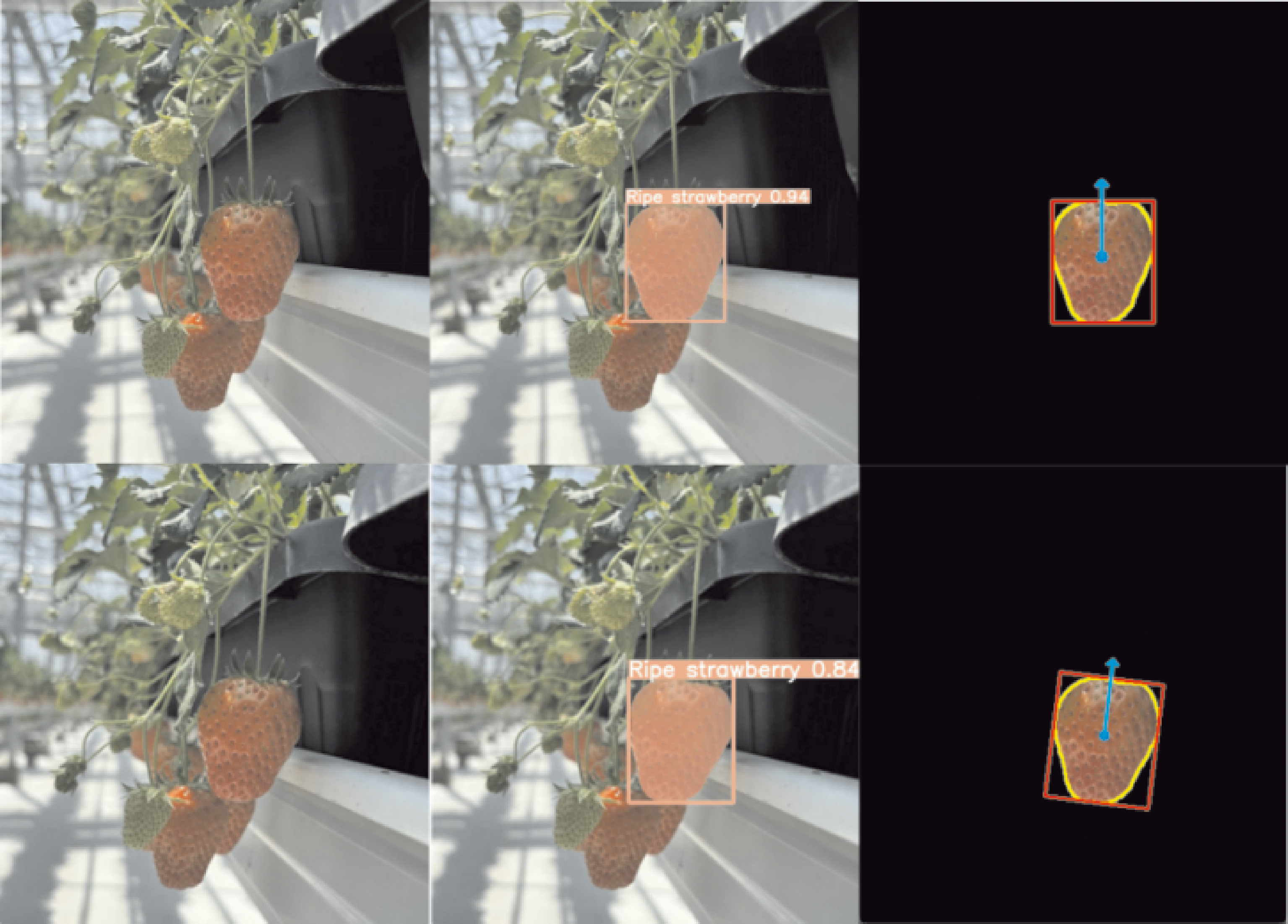
Fig.11 Strawberry identification and growth direction judgment
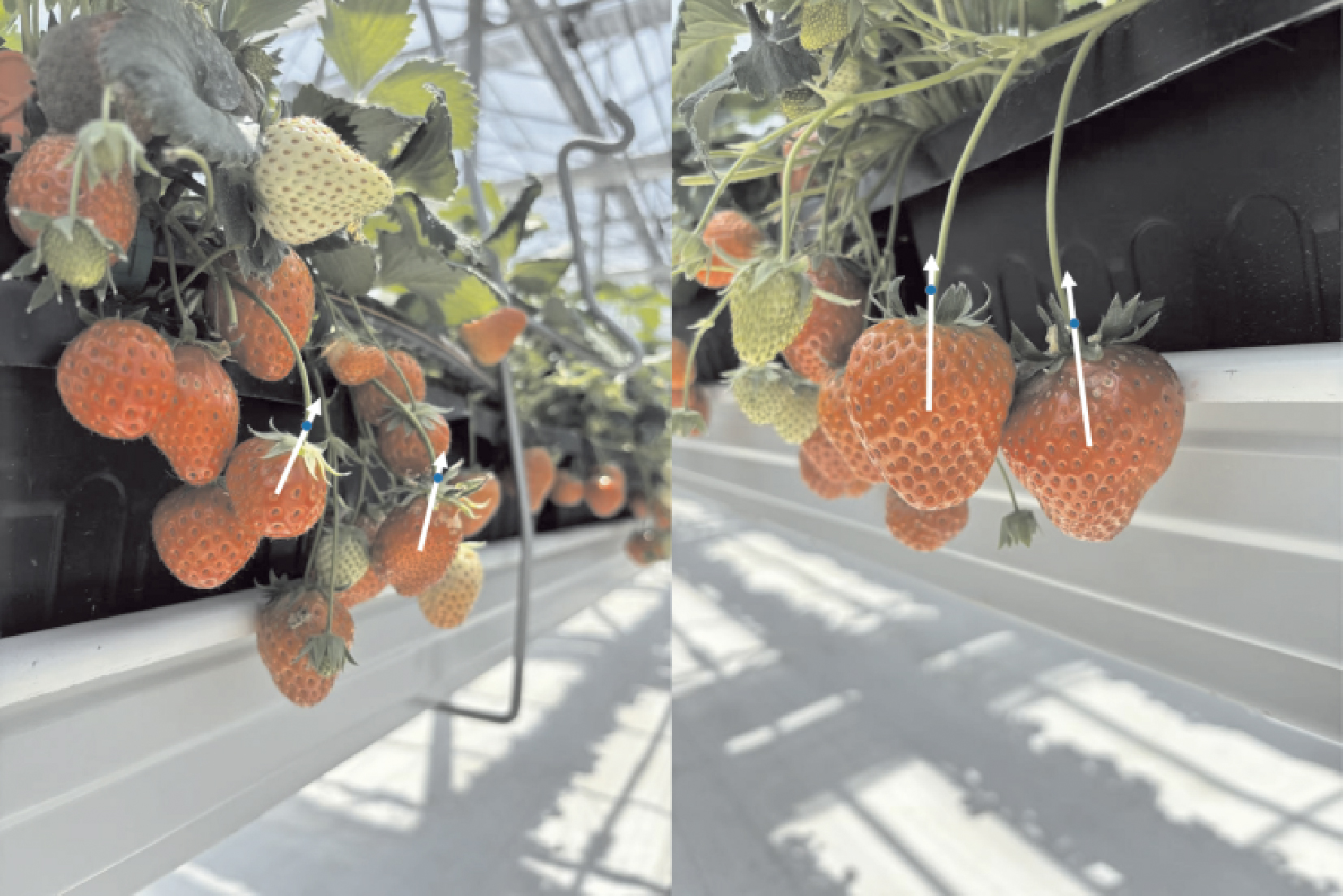
Fig.12 Fruit stalk cutting point assumptions
| 形状Shape | 判定系数K | 等级Grade |
|---|---|---|
| 圆形、纺锤形、(短)圆锥形、(短)楔形 | K>0.126 | 大Big |
| Circular, spindle-shaped, (short) conical, (short) wedge-shaped | 0.110≤K≤0.126 | 中Medium |
| K<0.110 | 小Small |
Table 2 Strawberry grade judgment
| 形状Shape | 判定系数K | 等级Grade |
|---|---|---|
| 圆形、纺锤形、(短)圆锥形、(短)楔形 | K>0.126 | 大Big |
| Circular, spindle-shaped, (short) conical, (short) wedge-shaped | 0.110≤K≤0.126 | 中Medium |
| K<0.110 | 小Small |

Fig.13 Strawberry picking experiment site

Fig.14 The complete set of strawberry picking and grading robot
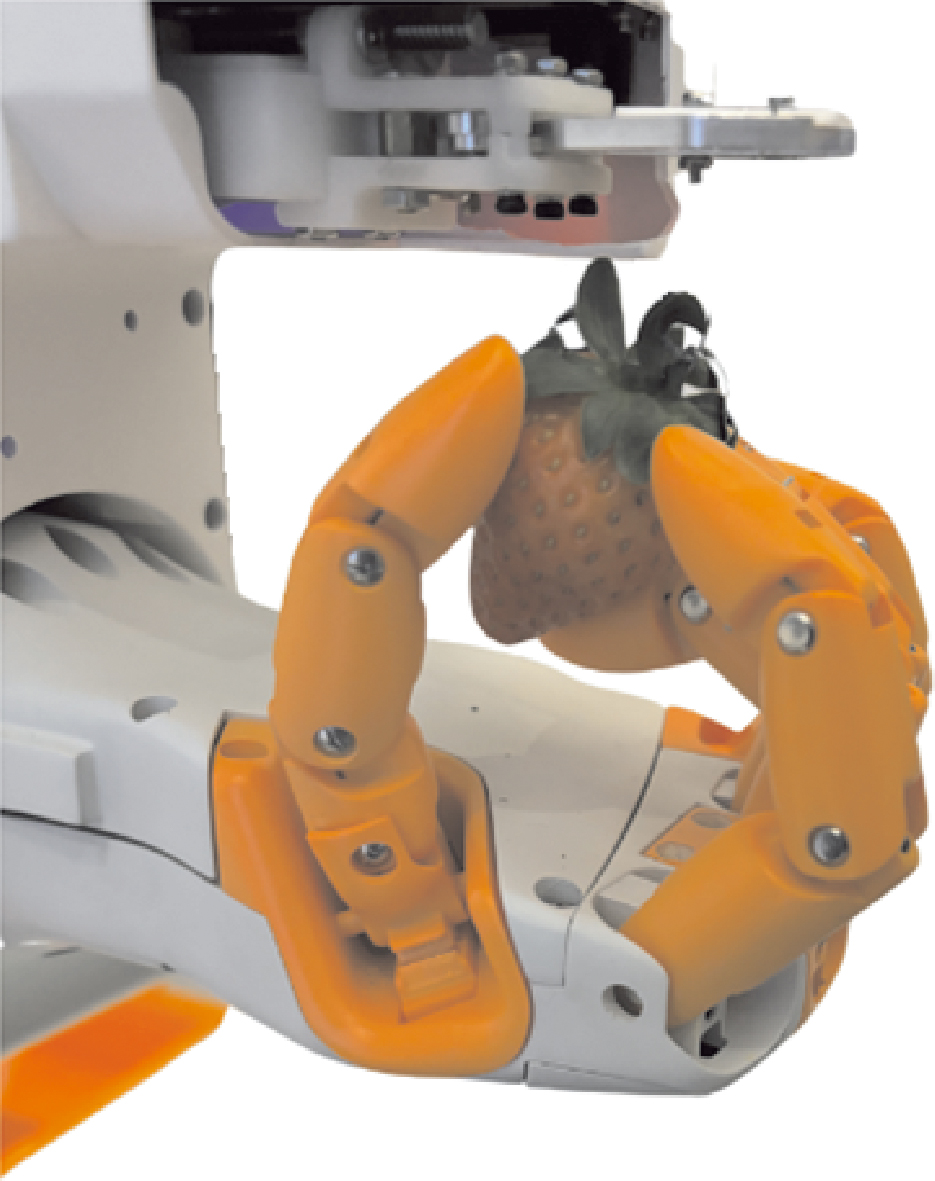
Fig.15 Actual envelope state
| 分级类型 Grading type | 序号 No. | 准确率 Accuracy/% |
|---|---|---|
| 大果Big fruit | 1 | 84.21 |
| 2 | 88.00 | |
| 3 | 85.19 | |
| 中果Medium fruit | 1 | 91.70 |
| 2 | 86.96 | |
| 3 | 89.28 | |
| 小果Small fruit | 1 | 87.35 |
| 2 | 90.91 | |
| 3 | 83.33 | |
| 平均Average | 87.44 |
Table 3 Strawberry grading results
| 分级类型 Grading type | 序号 No. | 准确率 Accuracy/% |
|---|---|---|
| 大果Big fruit | 1 | 84.21 |
| 2 | 88.00 | |
| 3 | 85.19 | |
| 中果Medium fruit | 1 | 91.70 |
| 2 | 86.96 | |
| 3 | 89.28 | |
| 小果Small fruit | 1 | 87.35 |
| 2 | 90.91 | |
| 3 | 83.33 | |
| 平均Average | 87.44 |

Fig.16 Strawberry grading
| [1] | 何娟, 肖祥飞, 郑美娟. 草莓营养品质的鉴定分析[J]. 食品安全导刊, 2023(9): 88-91. |
| HE J, XIAO X F, ZHENG M J. Identification and analysis of nutritional quality in strawberry[J]. China Food Safety Magazine, 2023(9): 88-91. (in Chinese with English abstract) | |
| [2] | GIAMPIERI F, TULIPANI S, ALVAREZ-SUAREZ J M, et al. The strawberry: composition, nutritional quality, and impact on human health[J]. Nutrition, 2012, 28(1): 9-19. |
| [3] | 刘畅, 王晓, 李宪松, 等. 我国草莓生产态势及国内外比较分析[J]. 中国果树, 2023(7): 136-140. |
| LIU C, WANG X, LI X S, et al. Strawberry production situation in China and comparative analysis at home and abroad[J]. China Fruits, 2023(7): 136-140. (in Chinese with English abstract) | |
| [4] | 余锡寿, 刘跃萍. 植物工厂中影响植物品质的因素及其控制[J]. 农业展望, 2014, 10(5): 52-55. |
| YU X S, LIU Y P. Factors of influencing plant quality and its control in plant factory[J]. Agricultural Outlook, 2014, 10(5): 52-55. (in Chinese with English abstract) | |
| [5] | 霍恒志, 糜林, 李金凤, 等. 草莓架式基质栽培与地面栽培适应性比较试验[J]. 江西农业学报, 2010, 22(11): 48-49. |
| HUO H Z, MI L, LI J F, et al. Comparative experiment on adaptability of strawberry frame substrate cultivation and ground cultivation[J]. Acta Agriculturae Jiangxi, 2010, 22(11): 48-49. (in Chinese with English abstract) | |
| [6] | VASCONEZ J P, KANTOR G A, AUAT CHEEIN F A. Human-robot interaction in agriculture: a survey and current challenges[J]. Biosystems Engineering, 2019, 179: 35-48. |
| [7] | SINGH S, VAISHNAV R, GAUTAM S, et al. Agricultural robotics: a comprehensive review of applications, challenges and future prospects[C]// 2024 2nd International Conference on Artificial Intelligence and Machine Learning Applications Theme:Healthcare and Internet of Things (AIMLA). March 15-16, 2024, Namakkal, India. IEEE, 2024: 1-8. |
| [8] | 林欢, 许林云. 中国农业机器人发展及应用现状[J]. 浙江农业学报, 2015, 27(5): 865-871. |
| LIN H, XU L Y. The development and prospect of agricultural robots in China[J]. Acta Agriculturae Zhejiangensis, 2015, 27(5): 865-871. (in Chinese with English abstract) | |
| [9] | BAO G J, YAO P F, CAI S B, et al. Flexible pneumatic end-effector for agricultural robot: Design & experiment[C]//2015 IEEE International Conference on Robotics and Biomimetics (ROBIO). December 6-9, 2015, Zhuhai, China. IEEE, 2015: 2175-2180. |
| [10] | 李娜, 王家忠, 张建宝, 等. 一种刚柔混联欠驱动草莓采摘机械手设计[J]. 河北农业大学学报, 2015, 38(1): 118-121. |
| LI N, WANG J Z, ZHANG J B, et al. Design of underactuated strawberry harvesting manipulator with rigid-compliant structured[J]. Journal of Agricultural University of Hebei, 2015, 38(1): 118-121. (in Chinese with English abstract) | |
| [11] | LI Z G, MIAO F L, YANG Z B, et al. Factors affecting human hand grasp type in tomato fruit-picking: a statistical investigation for ergonomic development of harvesting robot[J]. Computers and Electronics in Agriculture, 2019, 157: 90-97. |
| [12] | WANG J N, LI B X, LI Z G, et al. Grasping behavior of the human hand during tomato picking[J]. Computers and Electronics in Agriculture, 2021, 180: 105901. |
| [13] | 李鑫. 用于机器采摘的高架草莓识别与分级方法的研究[D]. 南京: 东南大学, 2018. |
| LI X. A recognition and grading method for machine picking of elevated strawberries[D]. Nanjing: Southeast University, 2018. (in Chinese with English abstract) | |
| [14] | 张樱飘. 基于深度学习的草莓采摘机器人果实识别定位与采后自动分级技术研究[D]. 天津: 天津理工大学, 2023. |
| ZHANG Y P. Study on fruit recognition and location and post-harvest automatic grading technology of strawberry picking robot based on deep learning[D]. Tianjin: Tianjin University of Technology, 2023. (in Chinese with English abstract) | |
| [15] | 刘建军, 姚立健, 彭樟林. 基于机器视觉的山核桃等级检测技术[J]. 浙江农业学报, 2010, 22(6): 854-858. |
| LIU J J, YAO L J, PENG Z L. Detection technique for Cathay hickory grade based on machine vision[J]. Acta Agriculturae Zhejiangensis, 2010, 22(6): 854-858. (in Chinese with English abstract) | |
| [16] | 姚立健, 边起, 雷良育, 等. 基于BP神经网络的水果分级研究[J]. 浙江农业学报, 2012, 24(5): 926-930. |
| YAO L J, BIAN Q, LEI L Y, et al. Classification of fruit based on the BP neural network[J]. Acta Agriculturae Zhejiangensis, 2012, 24(5): 926-930. (in Chinese with English abstract) | |
| [17] | 谭兴龙, 韩宇. 非视距环境下顾及杆臂补偿的UWB/IMU定位算法[J]. 中国惯性技术学报, 2024, 32(8): 762-770. |
| TAN X L, HAN Y. UWB/IMU positioning algorithm considering lever arm compensation in non-line-of-sight environment[J]. Journal of Chinese Inertial Technology, 2024, 32(8): 762-770. (in Chinese with English abstract) | |
| [18] | 李延平, 刘杰, 苏焱鸿, 等. 基于UWB的室内物料搬运机器人设计[J]. 机电技术, 2024, 47(4): 73-78. |
| LI Y P, LIU J, SU Y H, et al. Design of indoor material handling robot based on UWB[J]. Mechanical & Electrical Technology, 2024, 47(4): 73-78. (in Chinese with English abstract) | |
| [19] | 周增产, 赵静, 胡福生, 等. 草莓集装箱植物工厂设计与应用[J]. 农业工程, 2020, 10(9): 52-57. |
| ZHOU Z C, ZHAO J, HU F S, et al. Design and application of strawberry container plant factory[J]. Agricultural Engineering, 2020, 10(9): 52-57. (in Chinese with English abstract) | |
| [20] | MAO B J, ZHOU K Y, XIANG Y, et al. A bioinspired robotic finger for multimodal tactile sensing powered by fiber optic sensors[J]. Advanced Intelligent Systems, 2024, 6(8): 2400175. |
| [21] | BELTER J T, SEGIL J L, DOLLAR A M, et al. Mechanical design and performance specifications of anthropomorphic prosthetic hands: a review[J]. The Journal of Rehabilitation Research and Development, 2013, 50(5): 599. |
| [22] | XIONG C H, CHEN W R, SUN B Y, et al. Design and implementation of an anthropomorphic hand for replicating human grasping functions[J]. IEEE Transactions on Robotics, 2016, 32(3): 652-671. |
| [23] | CONTROZZI M, CLEMENTE F, BARONE D, et al. The SSSA-MyHand: a dexterous lightweight myoelectric hand prosthesis[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2017, 25(5): 459-468. |
| [24] | 张琛. 基于机器视觉的苹果外观品质分级系统研究[D]. 青岛: 山东科技大学, 2020. |
| ZHANG C. Research on apple appearance quality grading system based on machine vision[D]. Qingdao: Shandong University of Science and Technology, 2020. (in Chinese with English abstract) | |
| [25] | 任潇, 朱孟东, 武宁, 等. 我国草莓等级规格标准比对分析研究[J]. 农产品质量与安全, 2023(1): 39-45. |
| REN X, ZHU M D, WU N, et al. Comparative analysis of strawberry grade and specification standards in China[J]. Quality and Safety of Agro-Products, 2023(1): 39-45. (in Chinese with English abstract) | |
| [26] | 覃磊, 孙开琼, 李诗高, 等. 基于RGB颜色相似度的成熟草莓图像分割[J]. 浙江农业学报, 2016, 28(2): 330-337. |
| QIN L, SUN K Q, LI S G, et al. Image segmentation of ripe strawberry based on RGB color similarity[J]. Acta Agriculturae Zhejiangensis, 2016, 28(2): 330-337. (in Chinese with English abstract) |
| [1] | CHEN Wei, WANG Rongrong, JIANG Wenjing, GENG Weisong, CHEN Cen. Preparation of chitosan-chitosan oligosaccharide composite film and its application in strawberry preservation [J]. Acta Agriculturae Zhejiangensis, 2025, 37(8): 1785-1793. |
| [2] | SHEN Lan, YANG Xiaofang, ZHANG Guofang. Identification and fungicide sensitivity of the pathogen causing root rot on strawberry [J]. Acta Agriculturae Zhejiangensis, 2025, 37(2): 417-425. |
| [3] | WANG Hongcheng, BAI Zihao, XU Haihao, XU Kai, HUANG Along, WANG Ze’en, WAN Fei, ZHANG Linan, WU Liqun. Portable famous tea fresh leaves picking machine based on lifting-picking action [J]. Acta Agriculturae Zhejiangensis, 2024, 36(5): 1161-1172. |
| [4] | WANG Ruyue, LUO Shasha, ZHEN Ziyi, WU Jialong, XU Yeyong, SUN Yali, HU Xiaojing, HU Haifang. Study on the characteristics of different maturity of apricot plum Flavor Queen fruit [J]. Acta Agriculturae Zhejiangensis, 2023, 35(12): 2865-2877. |
| [5] | ZHANG Xinyue, YANG Yucheng, DUAN Haoyue, ZHOU Yangjie, HUANG Jiayang, CHEN Ziyue, JIANG Jie, CHEN Shujuan. Preparation of nitrogen-doped carbon quantum dots-chitosan composite film and its preservation effect on strawberry [J]. Acta Agriculturae Zhejiangensis, 2023, 35(12): 2935-2943. |
| [6] | YANG Xiaofang, LI Yunduan, SUN Yunfan, LI Shaojia, MIAO Lixiang, ZHANG Yuchao, JIANG Guihua. Influence of substrate cultivation and soil cultivation on sucrose and citric acid accumulation of Yuexin strawberry [J]. Acta Agriculturae Zhejiangensis, 2022, 34(7): 1423-1430. |
| [7] | ZHANG Xinpeng, WANG Xin, SUN Jian, YI Guoyun, LI Songling. Isolation and identification of a Pseudomonas strain and its application potential in rape straw composting in Qinghai, China [J]. Acta Agriculturae Zhejiangensis, 2022, 34(2): 343-351. |
| [8] | FENG Xinxin, LI Fenglan, XU Yongqing, LI Lei, HE Fumeng, FENG Yanzhong, YUAN Qiang, LIU Di. Screening of cellulase producing strains from rotten wood in Xinjiang cold area and analysis of their characteristics of enzyme production at low temperature [J]. Acta Agriculturae Zhejiangensis, 2021, 33(8): 1468-1476. |
| [9] | LI Zansong, CAO Chengmao, WU Delin, ZHANG Jianyu. Design and experiment of hand-operated self-integrated picking machine for Carya cathayensis [J]. Acta Agriculturae Zhejiangensis, 2021, 33(7): 1309-1319. |
| [10] | LIU Dandan, SUN Wanyu, WANG He. Characterization and fixation analysis of three atrazine-degrading strains [J]. Acta Agriculturae Zhejiangensis, 2021, 33(6): 1078-1087. |
| [11] | LI Qingbin, QIN Benben, LI Yingying, FAN Kaifeng, YANG Dong, CHEN Lei, LIU Kun. Effects of continuous rain and sunless weather on microclimate, strawberry growth and quality in greenhouse [J]. Acta Agriculturae Zhejiangensis, 2021, 33(5): 831-839. |
| [12] | XU Shuangyan, ZHANG Tao, ZHANG Cheng, LIN Hui, SHUI Xianlei, ZHENG Huabao. Isolation and identification of an erythromycin degradation bacterium strain and its biodegradation characteristics [J]. Acta Agriculturae Zhejiangensis, 2021, 33(1): 131-141. |
| [13] | SUN Xiaojun, SHEN Qi, WU Yifei, YAO Xiaohong, LI Yuancheng, SUN Hong, WANG Xin, TANG Jiangwu, GE Xiangyang. Screening and utilization of ammonia-nitrogen-degrading microorganism [J]. , 2020, 32(9): 1683-1691. |
| [14] | GAO Wenjing, XIAO Lijiao, WANG Shunmin, HAN Qiuxia. Screening, identification and characterization of two halophilic, diesel-degrading bacteria [J]. , 2020, 32(7): 1241-1252. |
| [15] | FENG Jiangpeng, QIU Liping, LIANG Xiuyan, CHEN Bixiu, XIA Haiyang, PENG Chunlong, ZHONG Yongjun. Identification of antagonistic bacteria Bacillus velezensis JK3 against anthracnose of strawberry and its antipathogenic activity [J]. , 2020, 32(5): 831-839. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
